步进电机控制器设计 ________________________________________ 步进电机是机电控制中一种常用的执行机构,它的用途是将电脉冲转化为角位移,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)
通过控制脉冲个数即可以控制角位移量,从而达到准确定位的目的;同时通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的
一、步进电机常识 常见的步进电机分三种:永磁式(PM),反应式(VR)和混合式(HB),永磁式步进一般为两相,转矩和体积较小,步进角一般为7
5 度 或 15 度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1
5 度,但噪声和振动都很大
在欧美等发达国家 80 年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点
它又分为两相和五相:两相步进角一般为1
8 度而五相步进角一般为 0
这种步进电机的应用最为广泛
二、永磁式步进电机的控制 出于制作成本考虑,下面以永磁式步进电机为例,来介绍如何用单片机控制步进电机
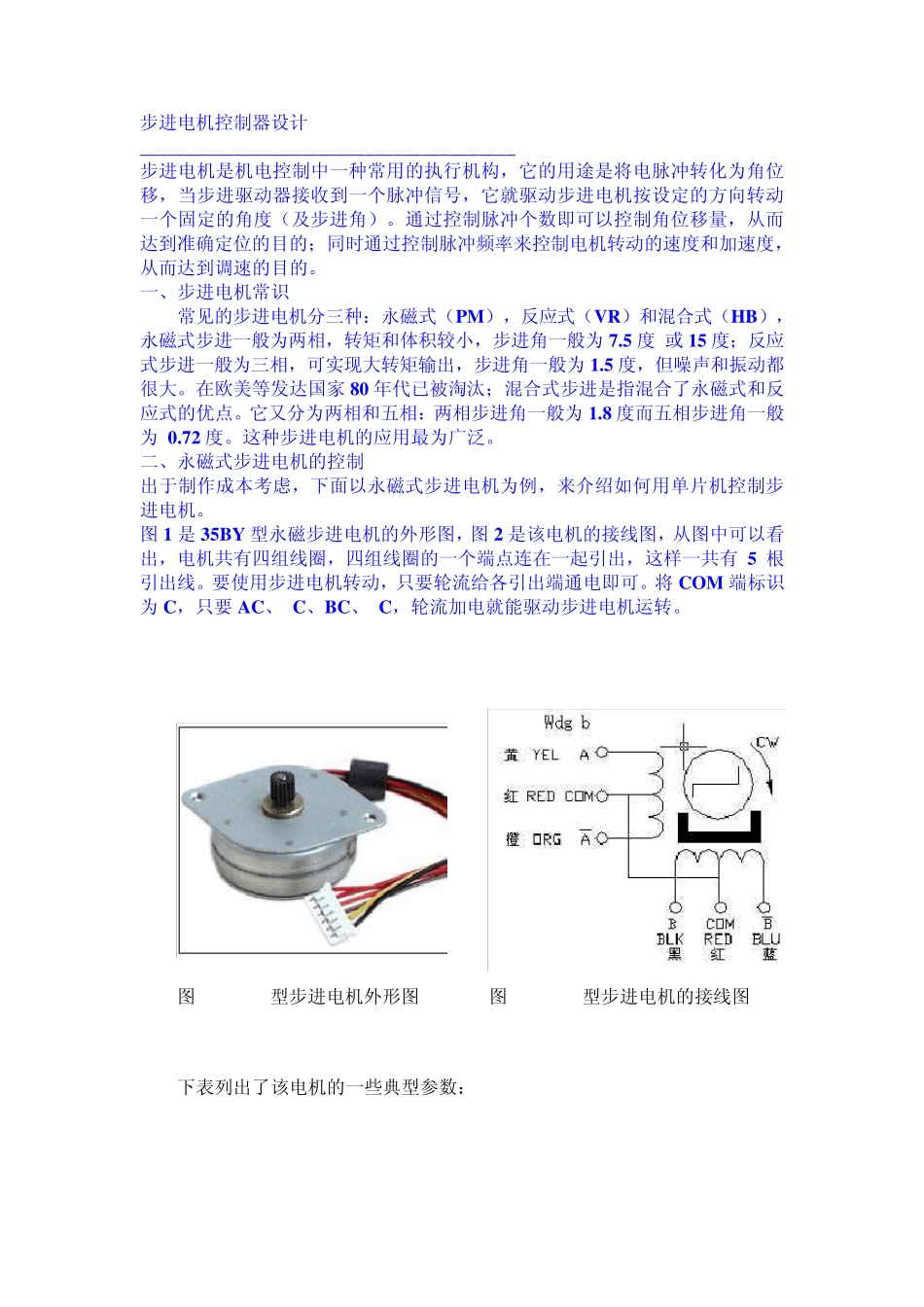
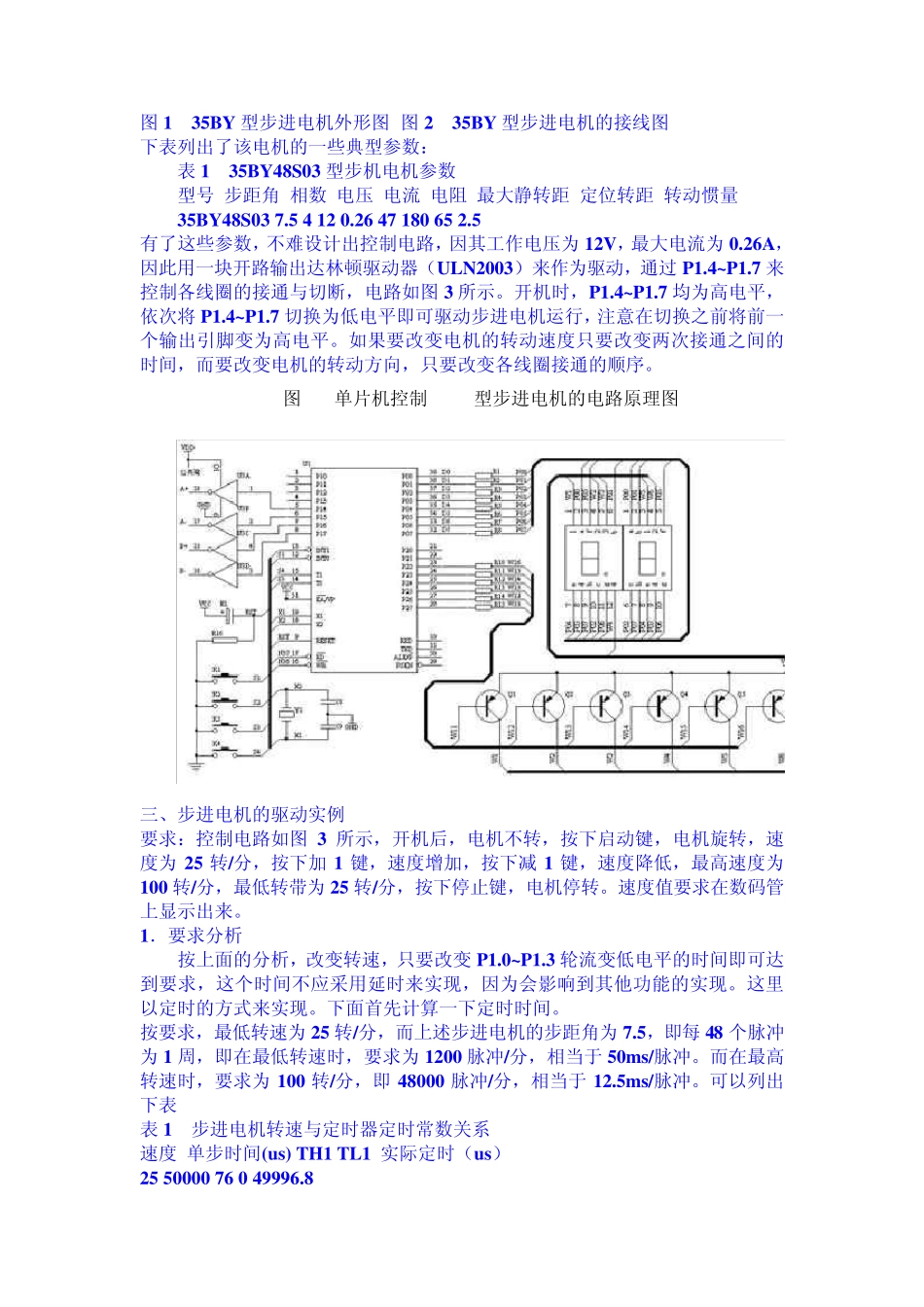
图 1 是35BY 型永磁步进电机的外形图,图 2 是该电机的接线图,从图中可以看出,电机共有四组线圈,四组线圈的一个端点连在一起引出,这样一共有 5 根引出线
要使用步进电机转动,只要轮流给各引出端通电即可
将COM 端标识为C,只要 AC、 C、BC、 C,轮流加电就能驱动步进电机运转
图 1 35BY型步进电机外形图 图 2 35BY型步进电机的接线图 下表列出了该电机的一些典型参数: 图1 35BY 型步进电机外形图 图2 35BY 型步进电机的接线图 下表列出了该电机的一些典型参数: 表1 35BY48S03 型步机电机参数 型号 步距角 相数 电压 电流 电阻 最大静转距 定位转距 转动惯量 35BY48S03 7
5 4 12 0