步进电动机基本原理实验 (一)实验目的 1
了解步进电动机的基本结构和工作原理; 2
掌握步进电机驱动程序的设计方法; 3
掌握步进电动机速度调节、方向控制技术; 4
了解步进电动机的各项基本参数对电机运行的影响; 5
熟悉 DRLab实验室的操作方法 (二)实验仪器设备 1
DRVI/DRLink可重组虚拟仪器和计算机控制平台 2
电机运动控制系统 3
打印机 (三)实验原理 ● 当某一相绕阻通电时,对应的磁极产生磁场,并与转子形成磁路,这时,如果定 子和转子的小齿没有对齐,在磁场的作用下,由于磁通具有力图走磁阻最小路径的特 点,转子将转动一定的角度,使转子与定子的齿相互对齐,由此可见,错齿是促使电 机旋转的原因
● 步进电动机又称为脉冲电机,它能将电脉冲转换为相应的角位直线位移
步进电 动机定子绕组的通电状态每改变一次,转子转一个确定的角度,为步进电动机的步距 角α
它与定子绕组的相数m、转子的齿数z、通电方式k有关,可用下式表示: ● 从图1所示,进步电机以四相单四拍方式正转时,按A→B→C→D 次序通电
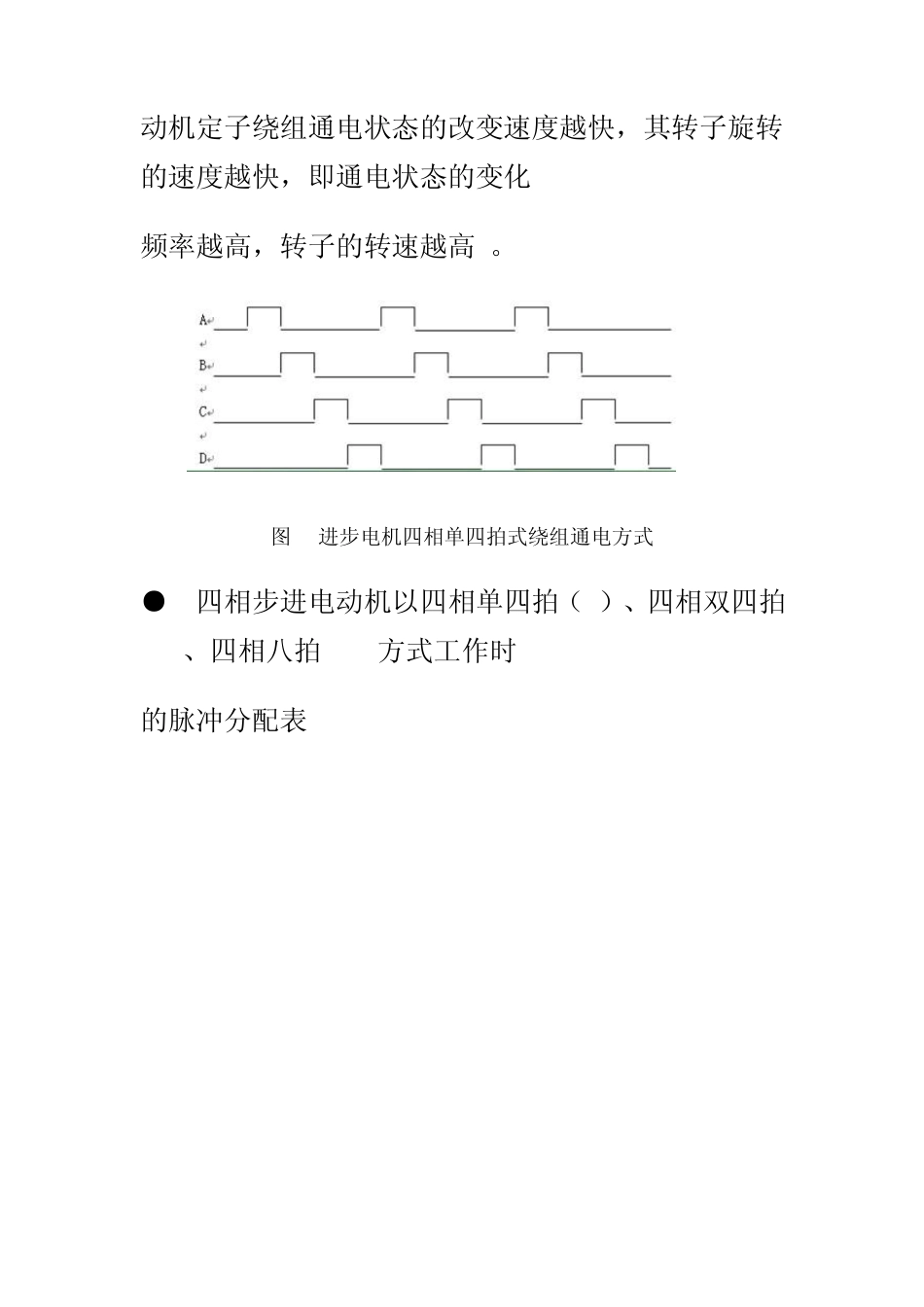
步进电 动机定子绕组通电状态的改变速度越快,其转子旋转的速度越快,即通电状态的变化 频率越高,转子的转速越高
图 1进步电机四相单四拍式绕组通电方式 ● 四相步进电动机以四相单四拍(a)、四相双四拍(b)、四相八拍(c) 方式工作时 的脉冲分配表 ● 步进电动机的自锁功能是指若某一相一直通直流电时,则电机可以保持在固定的 位置上实现停车时转子定位 ● 运动控制实验台由运动控制卡、步进电机、直流电机、涡轮涡杆机构、光电限位 器、转速测量传感器、直线位移标尺和位移测量装置构成
可完成步进电机控制、直 流电机控制、转速测量、位移及负载效应测量、PI及PID调节等实验内容
步进电动机 的型号为42BYGH107,为4相电机
如图 2所示: (四)实验内