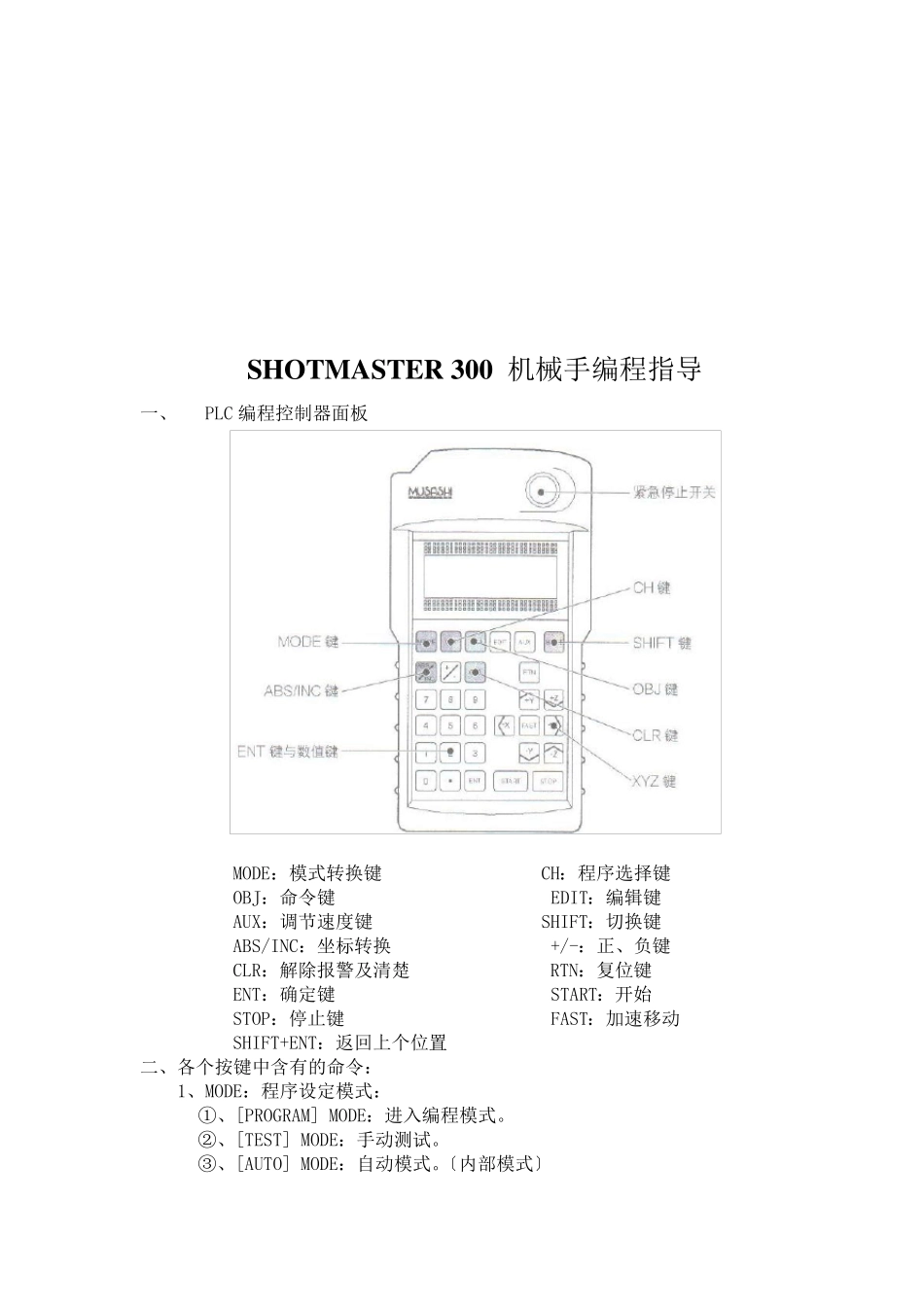
SHOTMASTER 300 机械手编程指导 一、 PLC 编程控制器面板 MODE:模式转换键 CH:程序选择键 OBJ:命令键 EDIT:编辑键 AUX:调节速度键 SHIFT:切换键 ABS/INC:坐标转换 +/-:正、负键 CLR:解除报警及清楚 RTN:复位键 ENT:确定键 START:开始 STOP:停止键 FAST:加速移动 SHIFT+ENT:返回上个位置 二、各个按键中含有的命令: 1、MODE:程序设定模式: ①、[PROGRAM] MODE:进入编程模式
②、[TEST] MODE:手动测试
③、[AUTO] MODE:自动模式
〔内部模式〕 ④、[RS—232C]电脑控制模式 ⑤、[PRINT]程序打印模式 ⑥、[EXT]MODE:自动运行模式
〔内、外部模式〕 2、OBJ: 0、 MOVE:以系统默认的速度移动 ①、TIMER:上一个命令的延时 ②、SUBROUTINE:插入子程序
④、REPEAT:对某段程序有限次数的循环 ⑤、JUMP:步骤跳跃 ⑥、CP LINE LINE:画直线 CURVE:划弧线 CIRCLE 划圆 ⑦、OUT 点胶命令
Ⅰ、Ⅲ点胶:1—1:1 停胶: 1—1:0 Ⅱ、MPP-1 抽胶:1—4:1 Ⅲ、吸气:1—6:1 Ⅳ、吐气:1—7:1 ⑧、OFFSET:将当前坐标改为原点坐标 17、MOVE Z:Z 轴上下调节
3、EDIT:(在[PROGRAM] MODE 条件下) ①、STEP CALL 调出步骤 ②、INSERT 插入命令 ③、DELETE 删除步骤 4、AUX:(在[PROGRAM] MODE 条件下) ①、ORIGINE
XYZ:复位时候的移动速度
SPEED:编程移动时的速度
SPEED:高速
SPEED:点到点的移动速度