机械原理课程设计 自动喂料搅拌机 小组成员 目录 一、设计题目(包括设计条件、要求) 二、功能分析 三、机构选用 四、方案评价(要求二种方案,多者不限) 五、机构组合(绘制机械运动简图) 六、机械系统运动循环图 八、机构几何尺寸计算和运动分析 九、 运用三维动画验证机构运动设计的合理性(部分机构) 十、设计总结 十一、主要参考文献
设计题目 设计用于化学工业和食品工业的自动喂料搅拌机
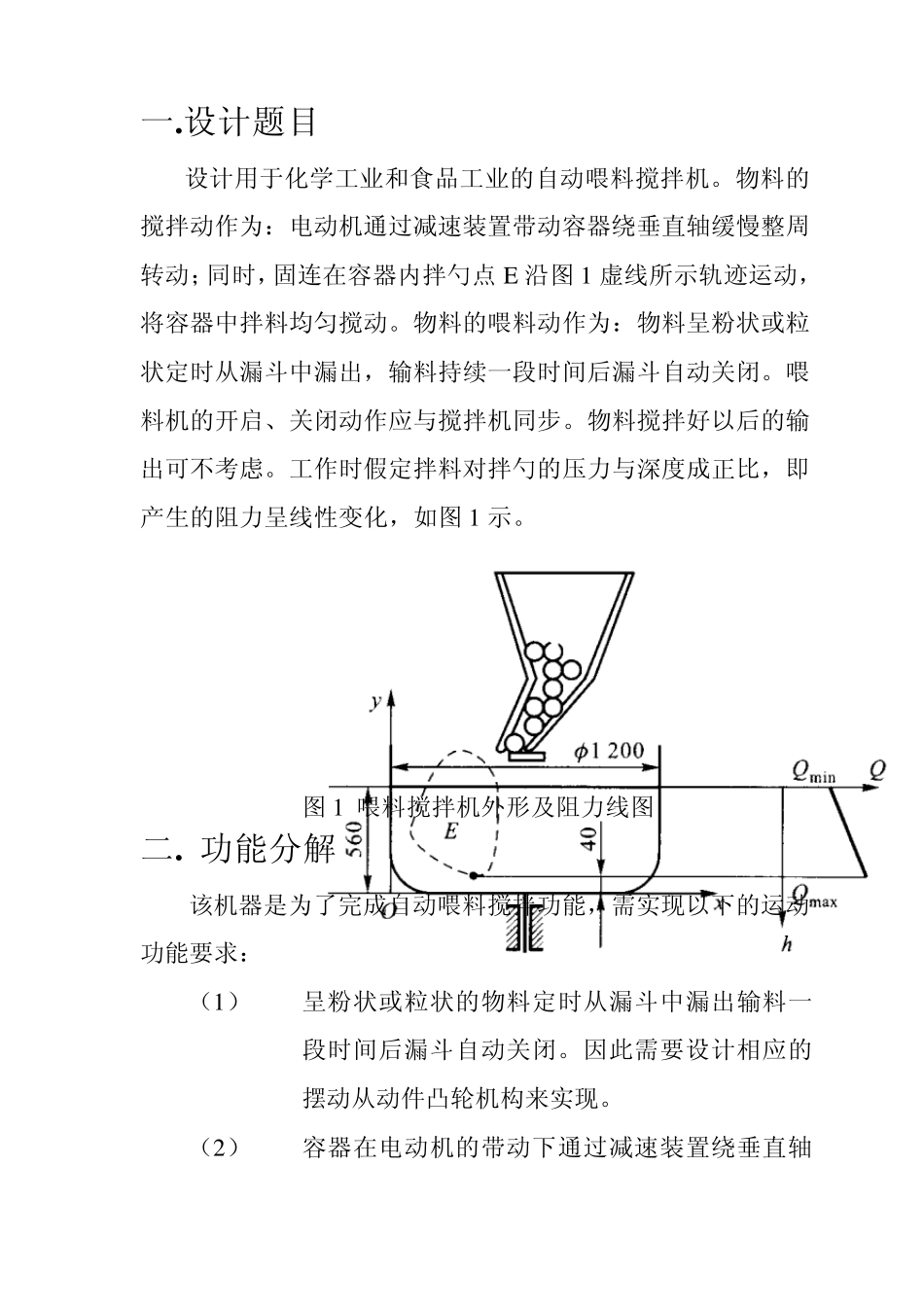
物料的搅拌动作为:电动机通过减速装置带动容器绕垂直轴缓慢整周转动;同时,固连在容器内拌勺点E 沿图1 虚线所示轨迹运动,将容器中拌料均匀搅动
物料的喂料动作为:物料呈粉状或粒状定时从漏斗中漏出,输料持续一段时间后漏斗自动关闭
喂料机的开启、关闭动作应与搅拌机同步
物料搅拌好以后的输出可不考虑
工作时假定拌料对拌勺的压力与深度成正比,即产生的阻力呈线性变化,如图1 示
图1 喂料搅拌机外形及阻力线图 二
功能分解 该机器是为了完成自动喂料搅拌功能,需实现以下的运动功能要求: (1) 呈粉状或粒状的物料定时从漏斗中漏出输料一段时间后漏斗自动关闭
因此需要设计相应的摆动从动件凸轮机构来实现
(2) 容器在电动机的带动下通过减速装置绕垂直轴转动
因此需要设计适当的齿轮机构来实现
(3 ) 固连在容器内拌勺按照规定的轨迹运动,将容器中拌料均匀搅动
因此需要合适的四杆机构来实现
通过对这三个机构的运动功能作进一步分析,可知道他们应该分别实现以下基本运动: (1 ) 摆动从动件凸轮机构的基本运动有:运动形式的变换,运动停歇,运动方向交替变换
(2 ) 齿轮机构的运动形式有:运动缩小,齿轮回转运动,运动轴线变换
(3 ) 四杆机构的运动形式有:连杆的的回转运动
三.机构选用 功能 执行构件 工艺动作 执行机构 喂料 摆杆 间歇摆动 摆 动从 动件盘 形 凸 轮 机构 旋转 回转轴 回转运