线性系统的根轨迹 一、 实验目的 1. 熟悉 MATLAB用于控制系统中的一些基本编程语句和格式
2. 利用 MATLAB语句绘制系统的根轨迹
3. 掌握用根轨迹分析系统性能的图解方法
4. 掌握系统参数变化对特征根位置的影响
二、 实验内容 1. 请绘制下面系统的根轨迹曲线
)1 36)(22()(22sssssKsG )1 0)(1 0 01 2)(1()1 2()(2sssssKsG )11
00 1 2
0)(10 7 1 4
0()10 5
0()(2ssssKsG 同时得出在单位阶跃负反馈下使得闭环系统稳定的K值的范围
2. 在系统设计工具 rltool界面中,通过添加零点和极点方法,试凑出上述系统,并观察增加极、零点对系统的影响
三、 实验结果及分析 1
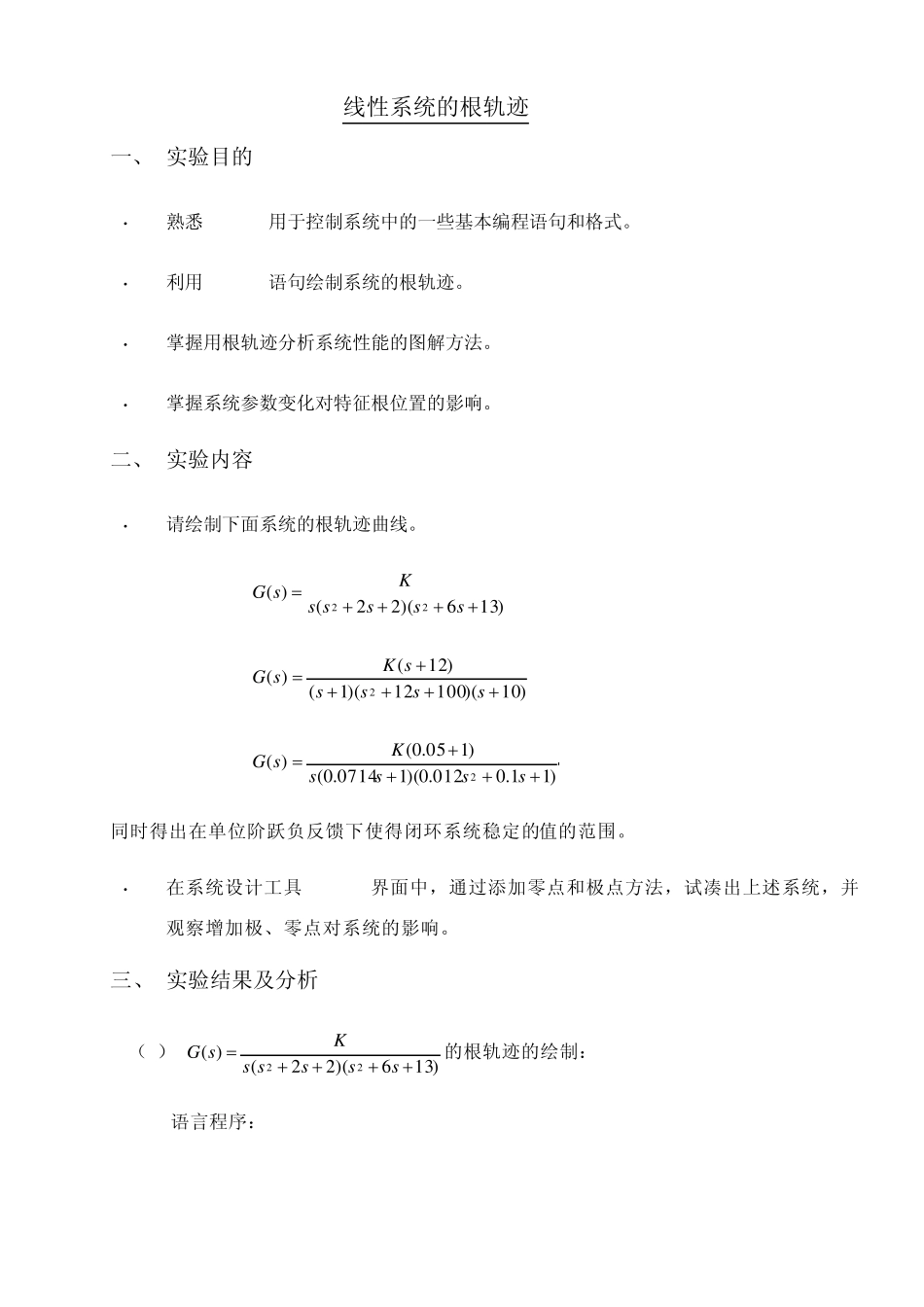
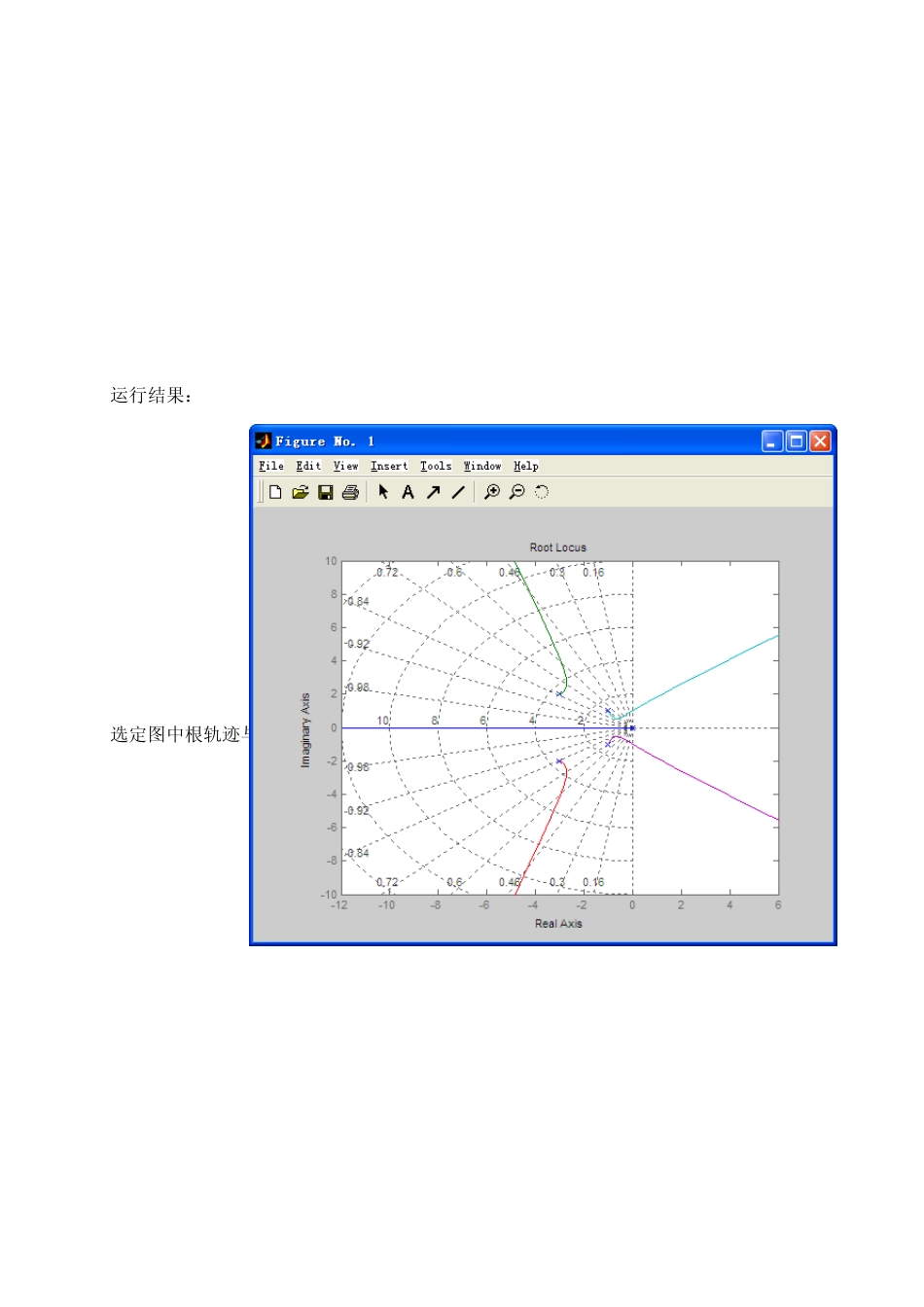
(1) )1 36)(22()(22sssssKsG的根轨迹的绘制: MATLAB语言程序: num=[1]; den=[1 8 27 38 26 0]; rlocus(num,den) [r,k]=rlocfind(num,den) grid xlabel('Real Axis'),ylabel('Imaginary Axis') title('Root Locus') 运行结果: 选定图中根轨迹与虚轴的交点,单击鼠标左键得: selected_point = 0
0021 + 0
9627i k = 28
7425 r = -2
8199 + 2
1667i -2
8199 - 2
1667i -2
3313 -0
0145 + 0
9873i -0
0145 - 0
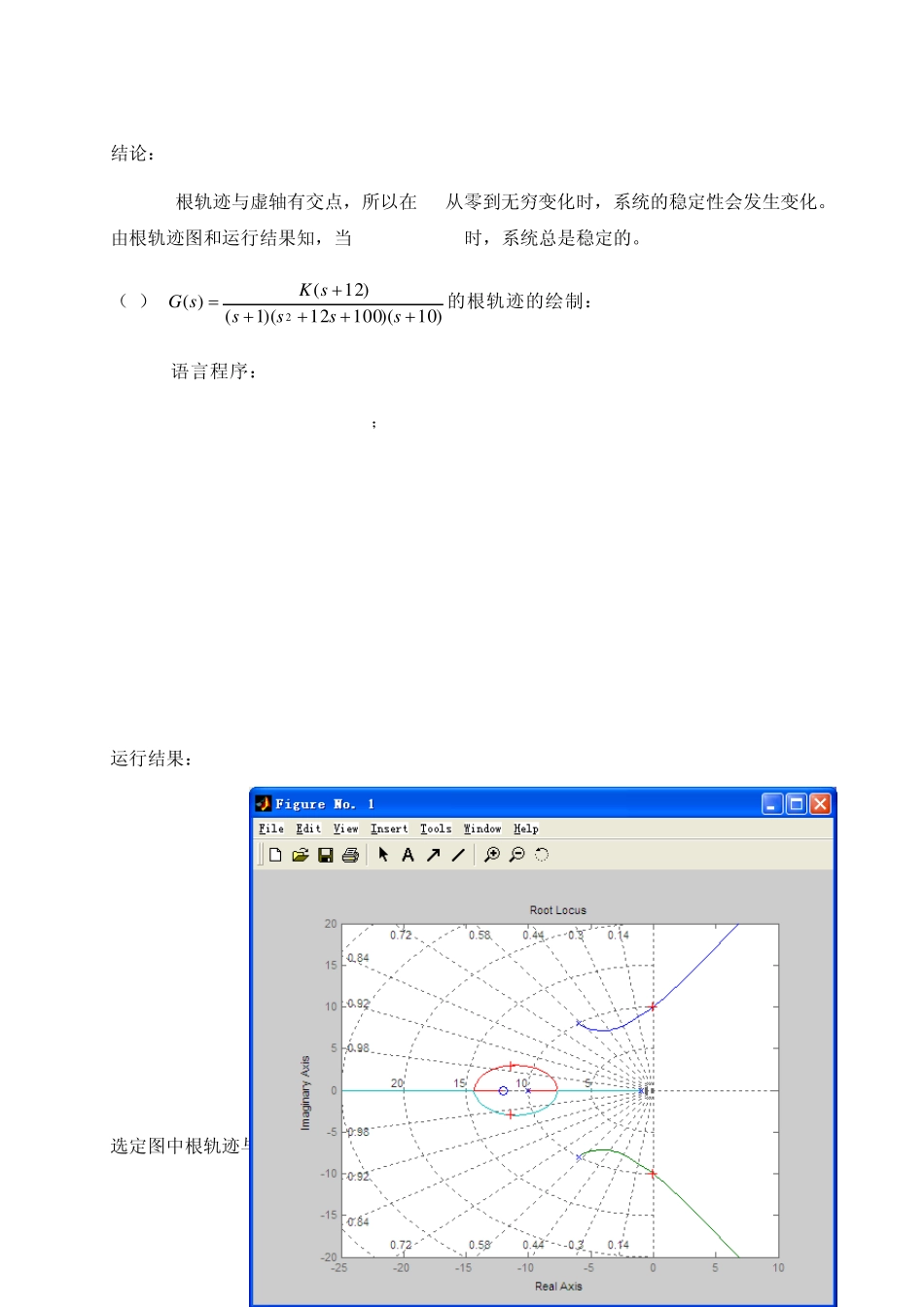
9873i 结论: 根轨迹与虚轴有交点,所以在K从零到无穷变化时,系统的稳定性会发生变化
由根轨迹图和运行结果知,当 0