舵机驱动原理 1、舵机简介 2、舵机的组成 3、舵机工作原理 4、舵机选购 5、舵机控制原理及编程方法 6、实验室用舵机 Fu taba S3003 使用说明 7、程序举例 1 概述 舵机也叫伺服电机,最早用于船舶上实现其转向功能,由于可以通过程序连续控制其转角,因而被广泛应用智能小车以实现转向以及机器人各类关节运动中,如图1 、图2 所示
图1 舵机用于机器人 图2 舵机用于智能小车中 舵机是小车转向的控制机构,具有体积小、力矩大、外部机械设计简单、稳定性高等特点,无论是在硬件设计还是软件设计,舵机设计是小车控制部分重要的组成部分,图3 为舵机的外形图
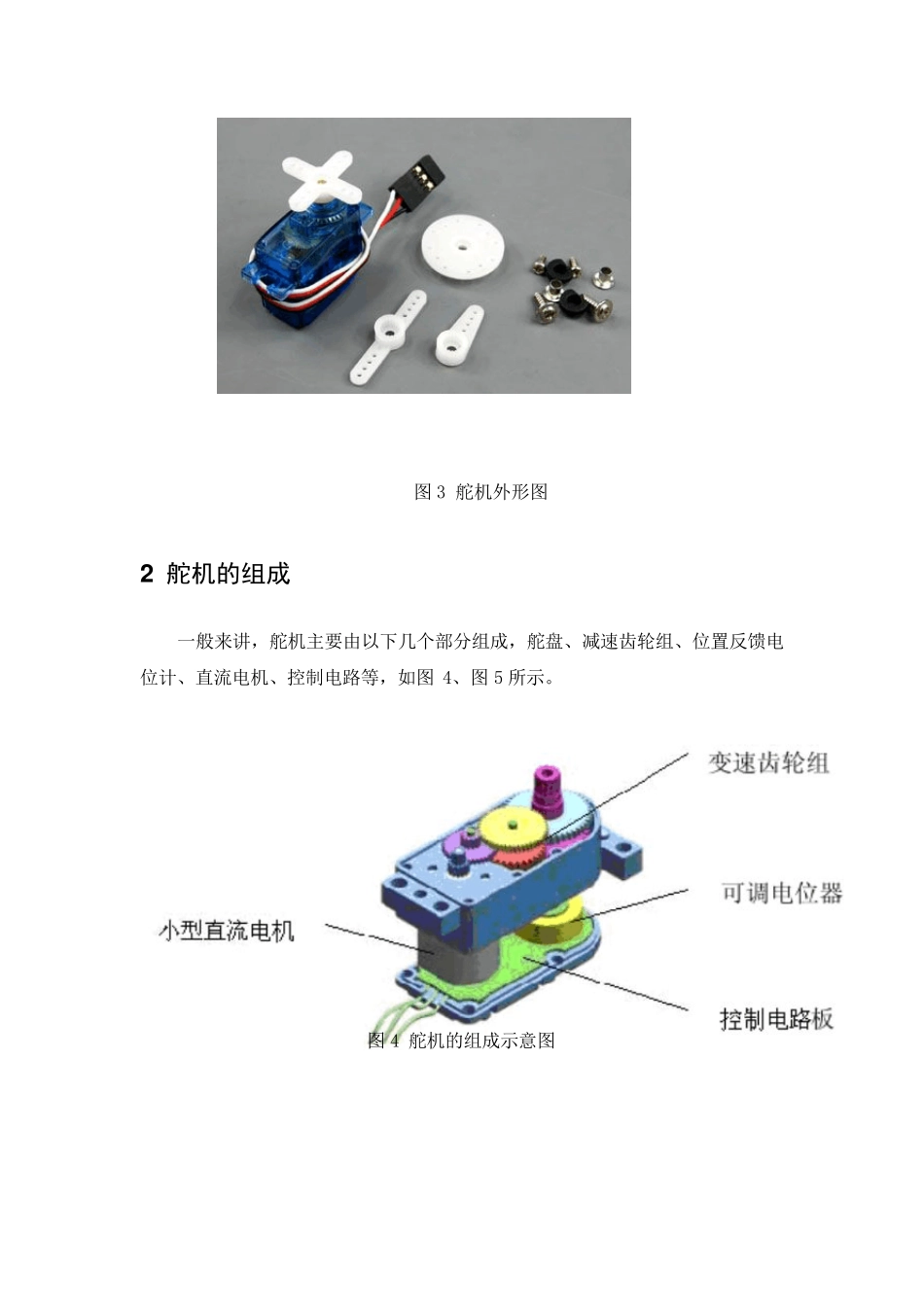
图3 舵机外形图 2 舵机的组成 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计、直流电机、控制电路等,如图4、图5 所示
图4 舵机的组成示意图 图5 舵机组成 舵机的输入线共有三条,如图6 所示,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗
电源有两种规格,一是4
8V,一是6
0V,分别对应不同的转矩标准,即输出力矩不同,6
0V 对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba 的一般为白色,JR 的一般为桔黄色
另外要注意一点,SANWA 的某些型号的舵机引线电源线在边上而不是中间,需要辨认
但记住红色为电源,黑色为地线,一般不会搞错
图6 舵机的输出线 3 舵机工作原理 控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘
舵机的输出轴和位置反馈电位计是相连的,舵盘转 动 的 同 时 , 带 动 位 置 反 馈 电 位 计 , 电 位 计 将 输 出 一 个 电 压 信 号 到 控 制 电 路 板 ,进 行 反 馈 , 然 后 控 制 电 路 板 根 据 所 在 位 置