zc2:EditDrEfeConfigdralionI'Zarriigur&Ccrtrnler2
Gsrtil^JBtafoMkitw3
ConfigureLinear0
CorriigLi^dh^nFLesuC«ocFwlo 阴KtetorFarmMotVaranBnakft:FbssMotor 匚CabteLtnoi□BSTFiu」Special[25:1]DetermineoonliouralHsiliromTypeCode>F^rLhJurTypeCnee
*ParLNumber
15JDRai|L5-f|EditDrEfeConfigdralionJICAMCJ3'
:PRCIFINETCAMM-S1SafetyModule
Conf*」旧3
ConfigureLinear4I
CorriigLi^dh^nFLesInlsmCircurtSphng:DetermineoonliouralHsiliromTypeCode>F^rLhJurTypeCnee
*PartNumber
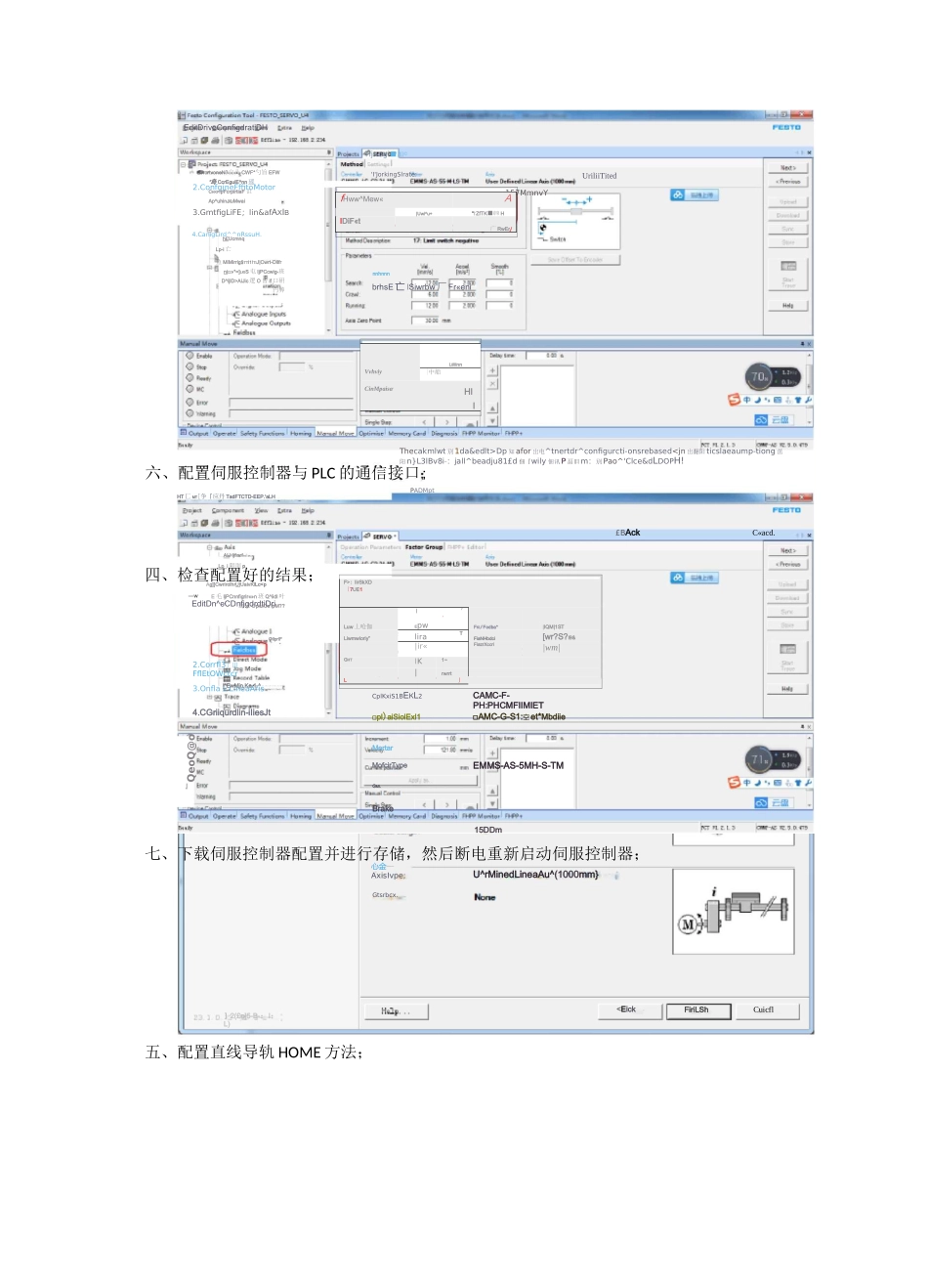
COERJIFimlyOptionSIctEklOptjonSlotBr|OptionSlct&l3:CMMP-AS-C2-FESTO 伺服控制器的配置方法、根据配置选择伺服控制器的型号和伺服控制器扩展卡的型号;、选择伺服电机的型号,填写伺服电机到伺服控制器的电缆长度,选择减速机齿轮比;三、填写直线导轨最大行程,以及直线导轨伺服驱动轮每旋转一圈的行进距离;UriliiTitednnhnnnEditDriveConfigdratiDH2
ConfgjneFffitoMotor3
GmtfigLiFE;lin&afAXIB4
CanigLird^^nRssuH
brhsE 亡 ISiwrbw 厂 Fr«eniPADMpt£BAckC«acd
Thecakmlwt