平面六杆机构得运动分析(题号 1 — B)成 绩 ___________________________指导老师 班 级 学 号 姓 名 1、题目阐明如右图所示平面六杆机构,试用计算机完毕其运动分析
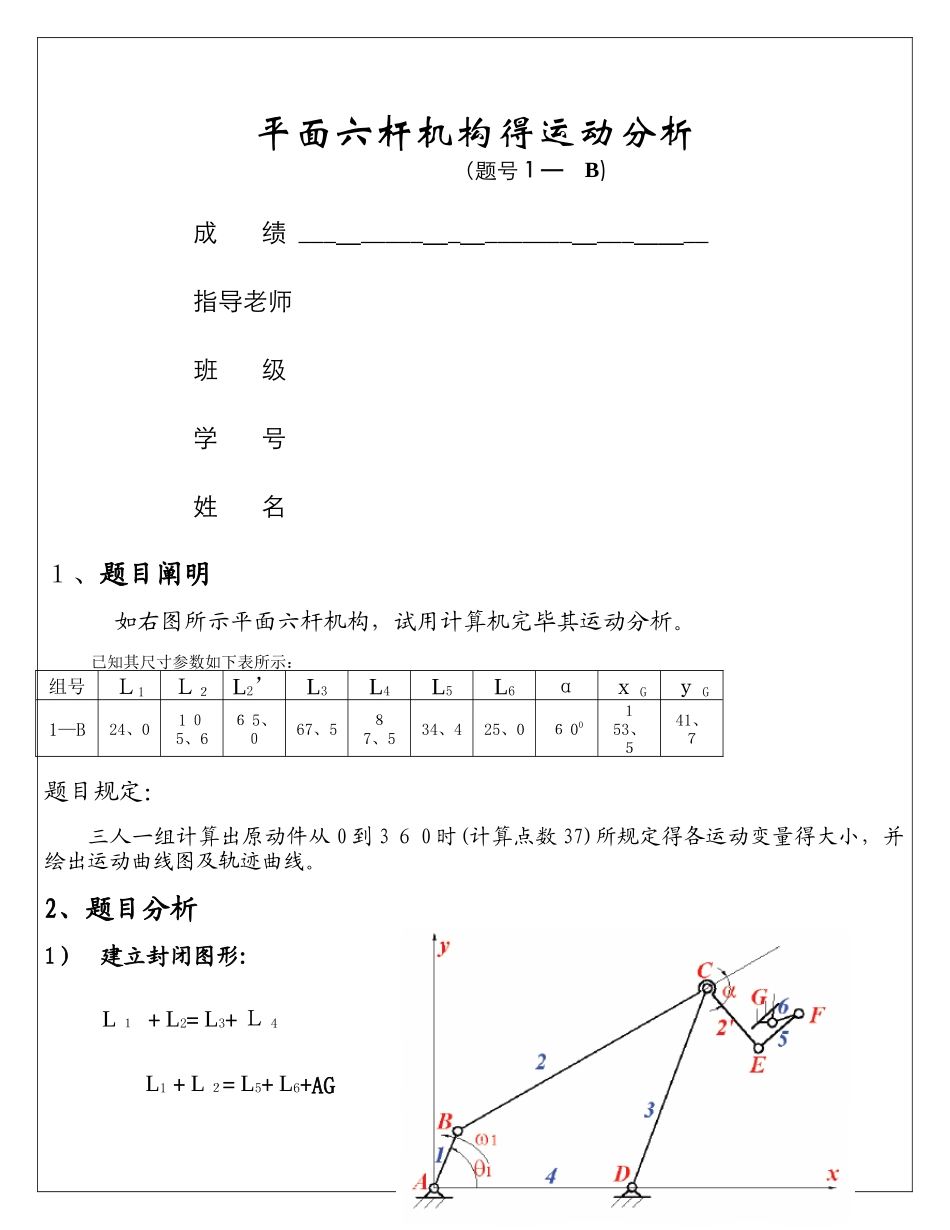
已知其尺寸参数如下表所示:组号L1L2L2’L3L4L5L6αx Gy G1—B24、01 05、66 5、067、587、534、425、06 00153、541、7题目规定:三人一组计算出原动件从 0 到 3 6 0 时(计算点数 37)所规定得各运动变量得大小,并绘出运动曲线图及轨迹曲线
2、题目分析1)建立封闭图形: L 1 + L2= L3+ L 4 L1 + L 2= L5+ L6+AG2) 机构运动分析a 、角位移分析 由图形封闭性得: 将上式化简可得:b 、角速度分析 上式对时间求一阶导数,可得速度方程:化为矩阵形式为:c 、角加速度分析: 矩阵对时间求一阶导数,可得加速度矩阵为:d 、E点得运动状态 位移:速度:加速度:3、 流程图4、 源程序#inc l u d e 〈m a th、h>#i nclu de 〈st dio、h>#incl u de ”aga u s、c”#include ”d net n、c”#in c lud e "c oni o、h”#d e fine A lp ha (PI/3)#de f i n e PI 3、14 9#d efine An g l e (PI/1 80) FI L E *f p; struct m o ti o n { i nt t h eta 1; double th e ta[5]; /*theta1,2,3,5,6*/ doubl e w[4];/*w2,3,5,6*/ d oubl e alp h a[4]; do u bl e XYe[2],Ve[3],ae[3]; }; struct m otion m