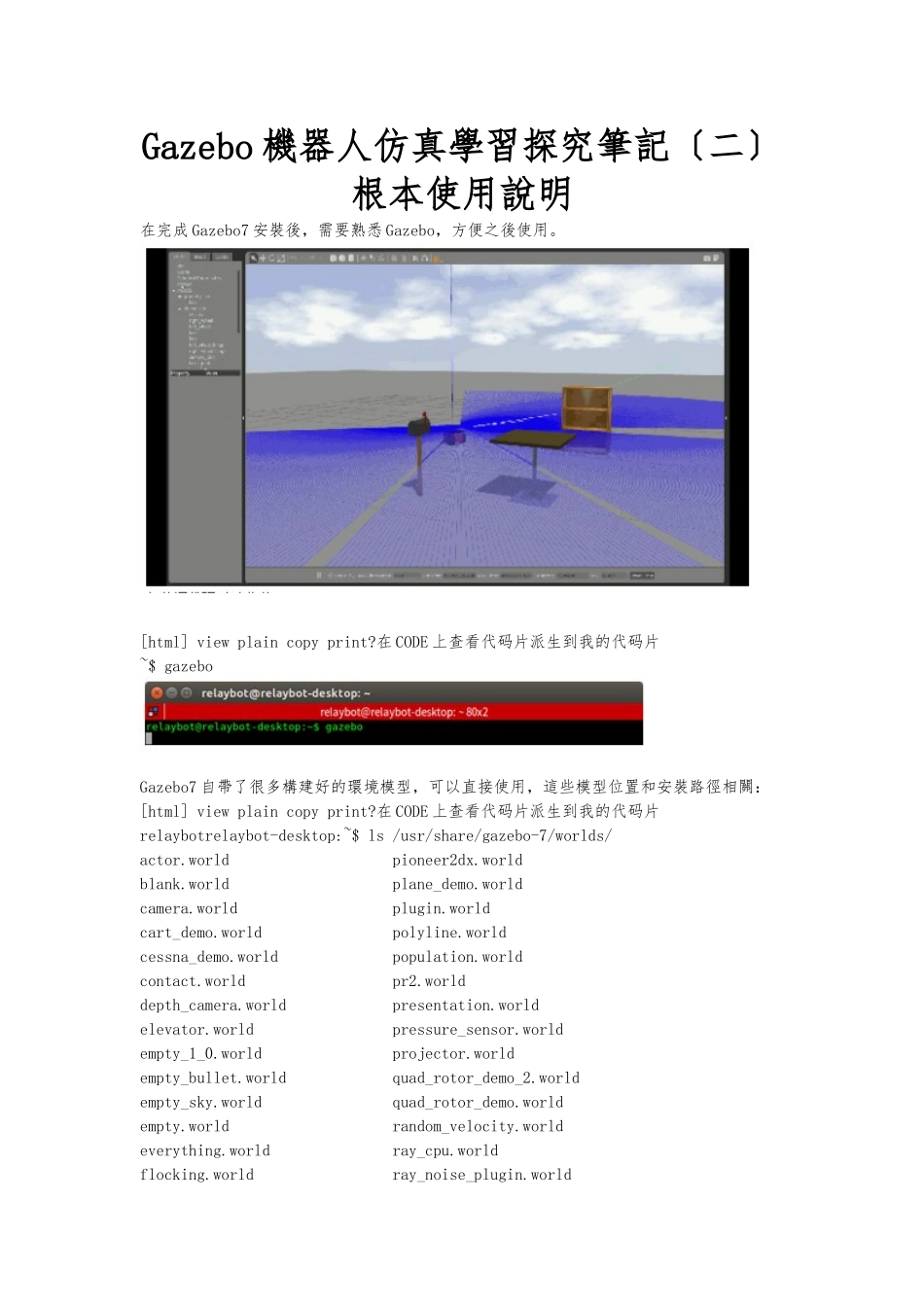
Gazebo 機器人仿真學習探究筆記〔二〕根本使用說明在完成 Gazebo7 安裝後,需要熟悉 Gazebo,方便之後使用
[html] view plain copy print
在 CODE 上查看代码片派生到我的代码片~$ gazebo Gazebo7 自帶了很多構建好的環境模型,可以直接使用,這些模型位置和安裝路徑相關:[html] view plain copy print
在 CODE 上查看代码片派生到我的代码片relaybotrelaybot-desktop:~$ ls /usr/share/gazebo-7/worlds/ actor
world pioneer2dx
world blank
world plane_demo
world camera
world plugin
world cart_demo
world polyline
world cessna_demo
world population
world contact
world pr2
world depth_camera
world presentation
world elevator
world pressure_sensor
world empty_1_0
world projector
world empty_bullet
world quad_rotor_demo_2
world empty_sky
world quad_rotor_demo
world empty
world random_velocity
world everything
world ray_cpu
world flocking
world ray_noise_plugin
world force_torque_demo
world road_textures
world friction_demo