无人机的数学模型无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机
可反复使用多次,广泛用于空中侦察、监视、通信、反潜和电子干扰等
因此讨论无人机控制系统的设计具有重要意义
要讨论无人机动力学模型的姿态仿真,首先必须建立飞机的数学模型
在忽略机体震动和变形的条件下,飞机的运动可以看成包含六个自由度的刚体运动,其中包含绕三个轴的三种转动(滚动、俯仰与偏航)和沿三个轴的线运动
为了确切的描述飞机的运动状态,必须选择合适的坐标系
1 常用坐标系1
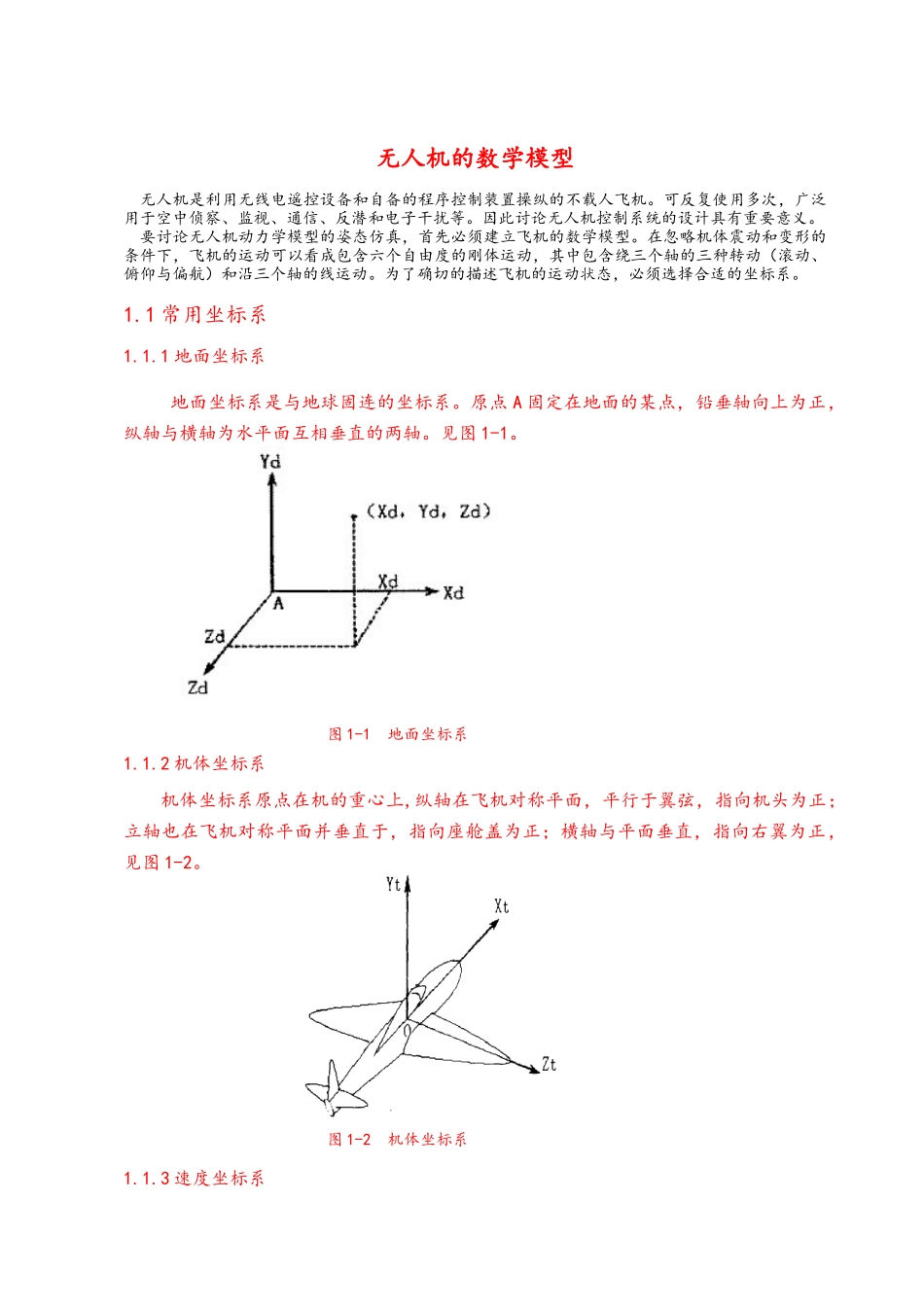
1 地面坐标系 地面坐标系是与地球固连的坐标系
原点 A 固定在地面的某点,铅垂轴向上为正,纵轴与横轴为水平面互相垂直的两轴
见图 1-1
图 1-1 地面坐标系1
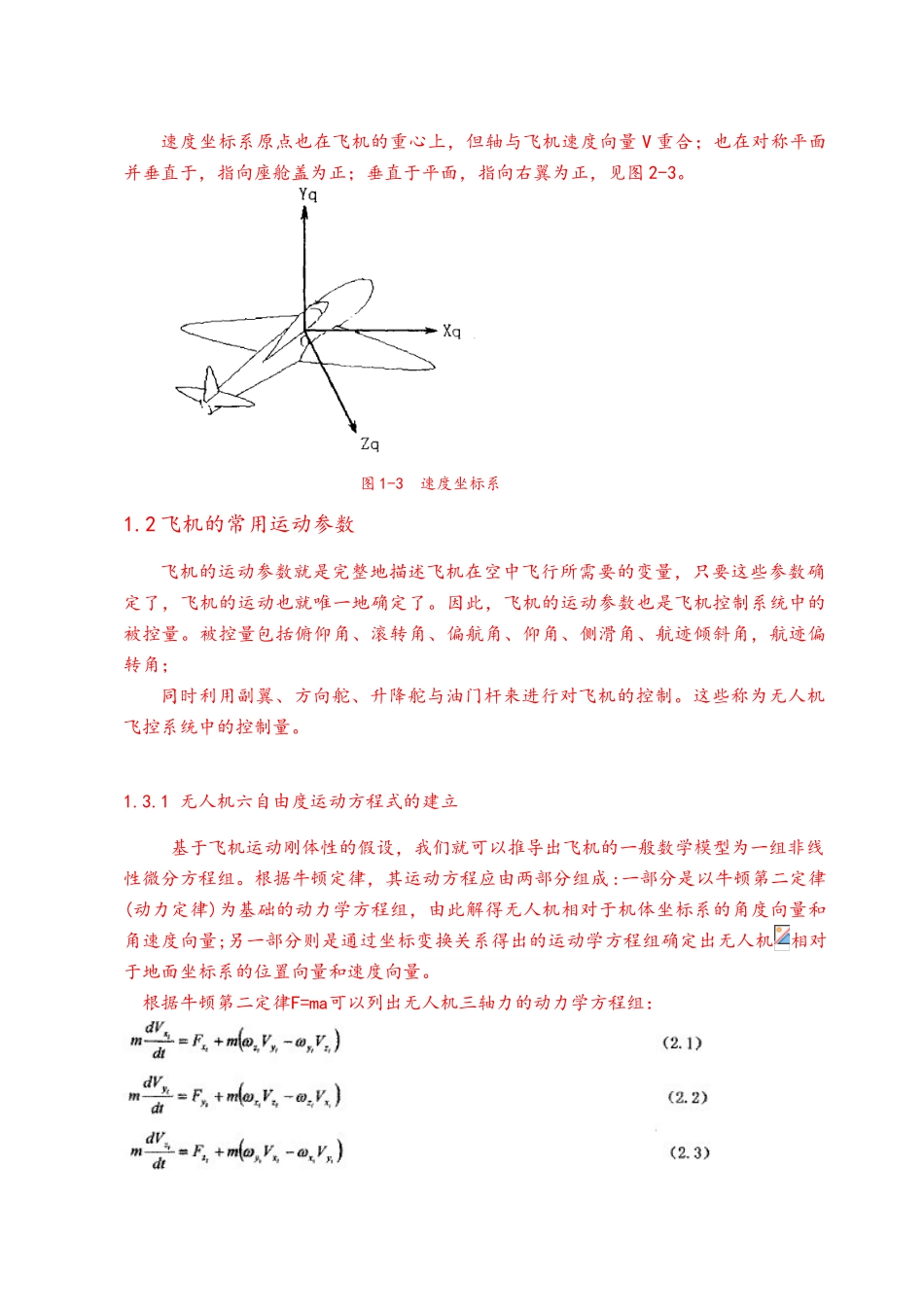
2 机体坐标系 机体坐标系原点在机的重心上,纵轴在飞机对称平面,平行于翼弦,指向机头为正;立轴也在飞机对称平面并垂直于,指向座舱盖为正;横轴与平面垂直,指向右翼为正,见图 1-2
图 1-2 机体坐标系1
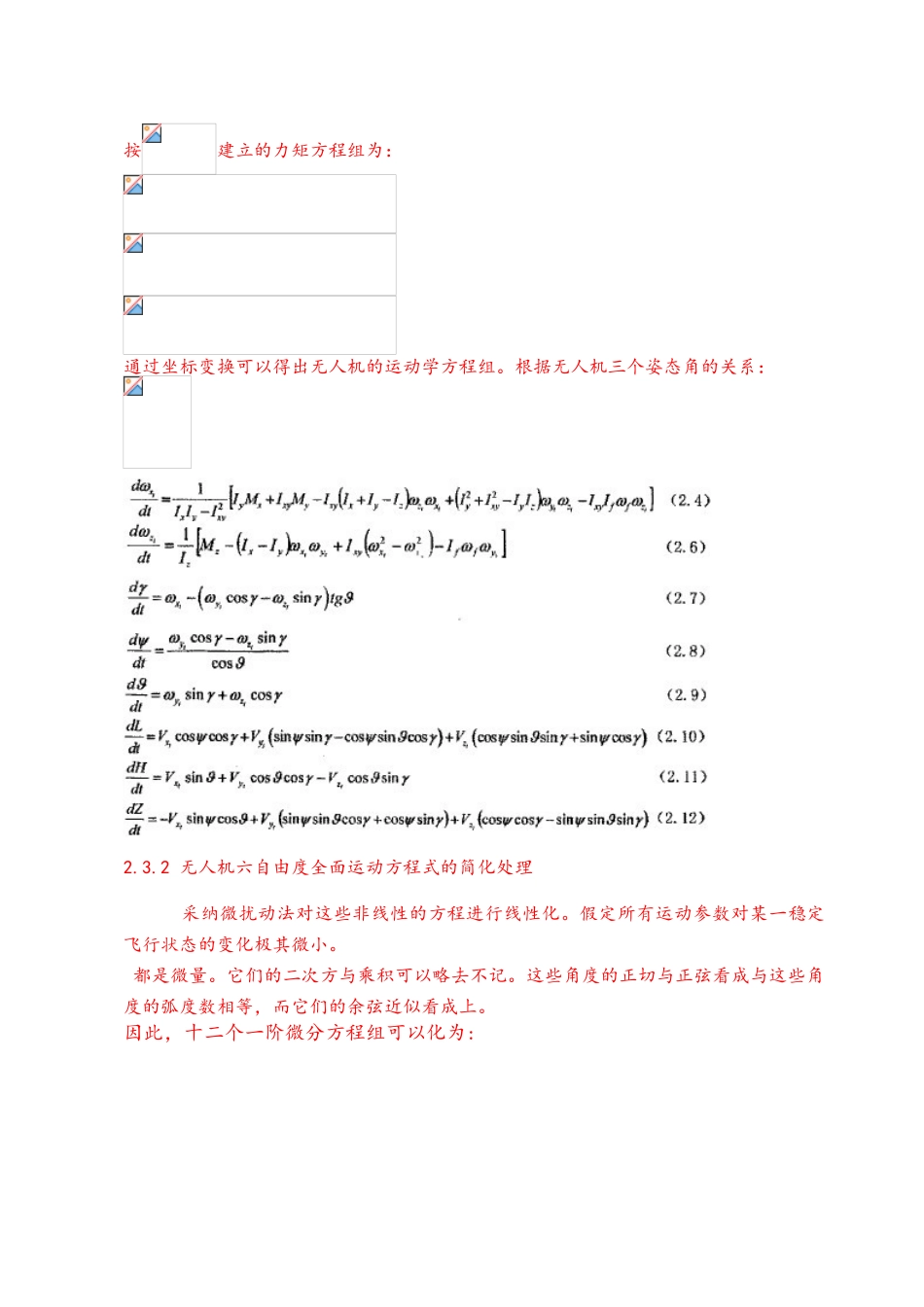
3 速度坐标系速度坐标系原点也在飞机的重心上,但轴与飞机速度向量 V 重合;也在对称平面并垂直于,指向座舱盖为正;垂直于平面,指向右翼为正,见图 2-3
图 1-3 速度坐标系1
2 飞机的常用运动参数飞机的运动参数就是完整地描述飞机在空中飞行所需要的变量,只要这些参数确定了,飞机的运动也就唯一地确定了
因此,飞机的运动参数也是飞机控制系统中的被控量
被控量包括俯仰角、滚转角、偏航角、仰角、侧滑角、航迹倾斜角,航迹偏转角;同时利用副翼、方向舵、升降舵与油门杆来进行对飞机的控制
这些称为无人机飞控系统中的控制量
1 无人机六自由度运动方程式的建立 基于飞机运动刚体性的假设,我们就可以推导出飞机的一般数学模型为一组非线性微分方程组
根据牛顿定律,其运动方程应由两部分组成:一部分是以牛顿第二定律(动力定律)为基础的动力学方程组,由此解得