第 5 课 齿轮传动——机械夹子 教学案一、提出问题 当我们想抓取桌子上的杯子,我们可以用手去抓取,那么机器人假如想抓取物体,该如何去抓取呢
机器人可不可以用手或夹子来抓取呢
这节课我们就来制作能抓取物体的夹子
二、联想 我们的手非常灵活,把机器人的手制作成像人一样的灵活,不是很容易,但是我们可以借鉴生活中的剪刀,镊子等工具,如图 5-1 和图 5-2 所示,模拟它们的结构制作一个夹子作为机器人的手,让机器人去抓取物体
图 5-1 剪刀图 5-2 镊子三、要求 机械夹子的制作1
机械夹子可以打开和闭合 2
用齿轮带动夹子进行传动四、构建1
夹子的制作夹子的制作利用两根弯曲的圆梁,两根圆梁一左一右组成夹子的左右两片,如图 5-3 所示
图 5-3 弯梁2
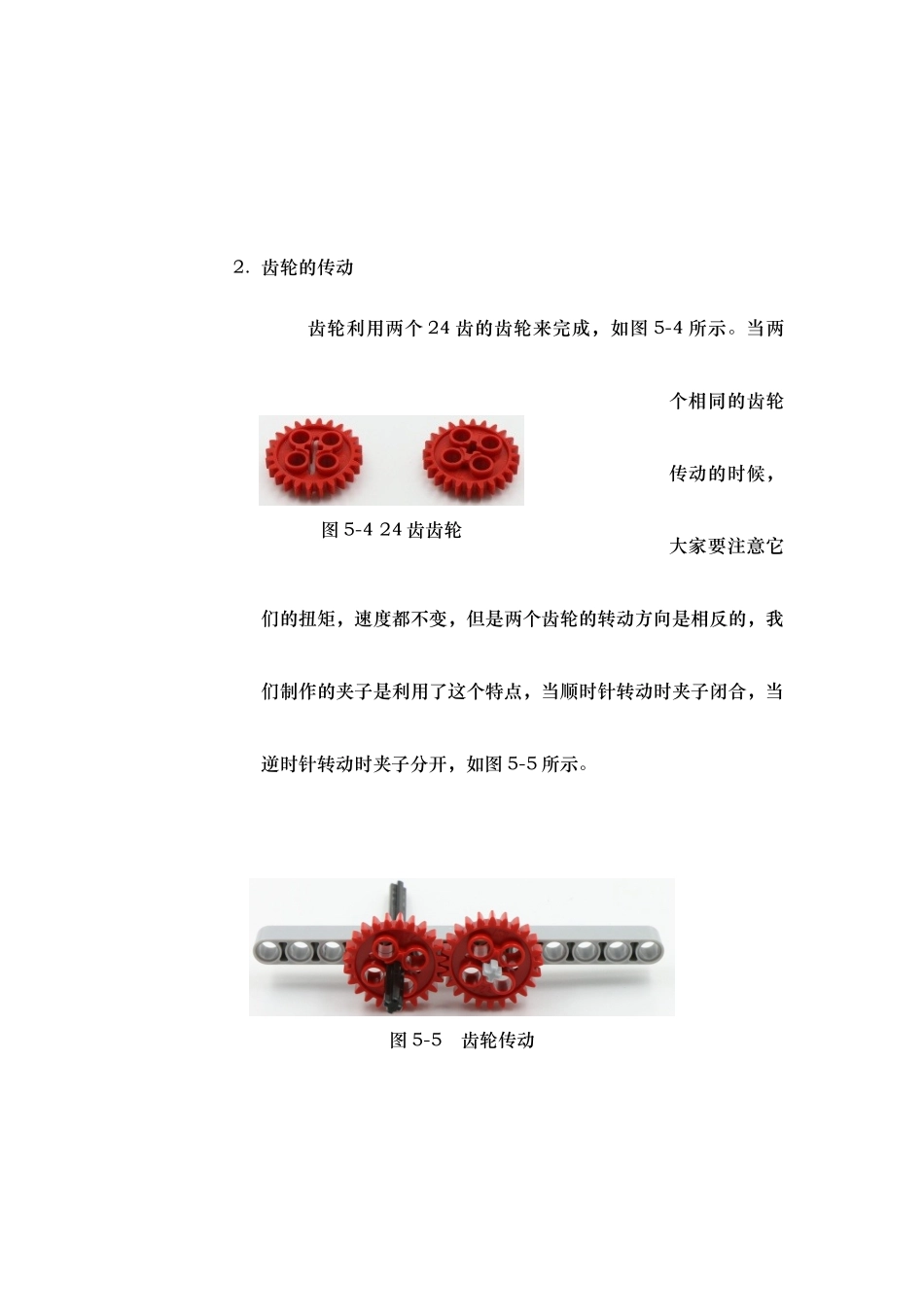
齿轮的传动齿轮利用两个 24 齿的齿轮来完成,如图 5-4 所示
当两个相同的齿轮传动的时候,大家要注意它们的扭矩,速度都不变,但是两个齿轮的转动方向是相反的,我们制作的夹子是利用了这个特点,当顺时针转动时夹子闭合,当逆时针转动时夹子分开,如图 5-5 所示
图 5-4 24 齿齿轮图 5-5 齿轮传动 3
完成后的效果,如图 5-6 所示
我们利用齿轮传动的特点制作了这个夹子,当转动手柄时,夹子就会分开或闭合
五、优化与改进 上面制作的夹子在使用上有什么问题吗
图 5-6 齿轮传动的夹子 我们可以发现刚才利用齿轮制作的机械夹子,在闭合和开启的时候速度太快,而且当关闭夹子时,夹子很容易自动松开
第一个问题可以通过改变齿轮的传动比来解决,第二个问题要求夹子可以自动锁定,用机械结构解决比较困难
因此,为了解决这两个问题,我们要利用乐高的一个新的齿轮:涡轮
技能牌:涡轮,如图 5-7 所示
涡轮通常会与齿轮进行啮合,并且会连接两个互相垂直的轴,也就是说通过涡轮的传动可以改变力的方向,而且涡轮可以增大扭矩,减小角速