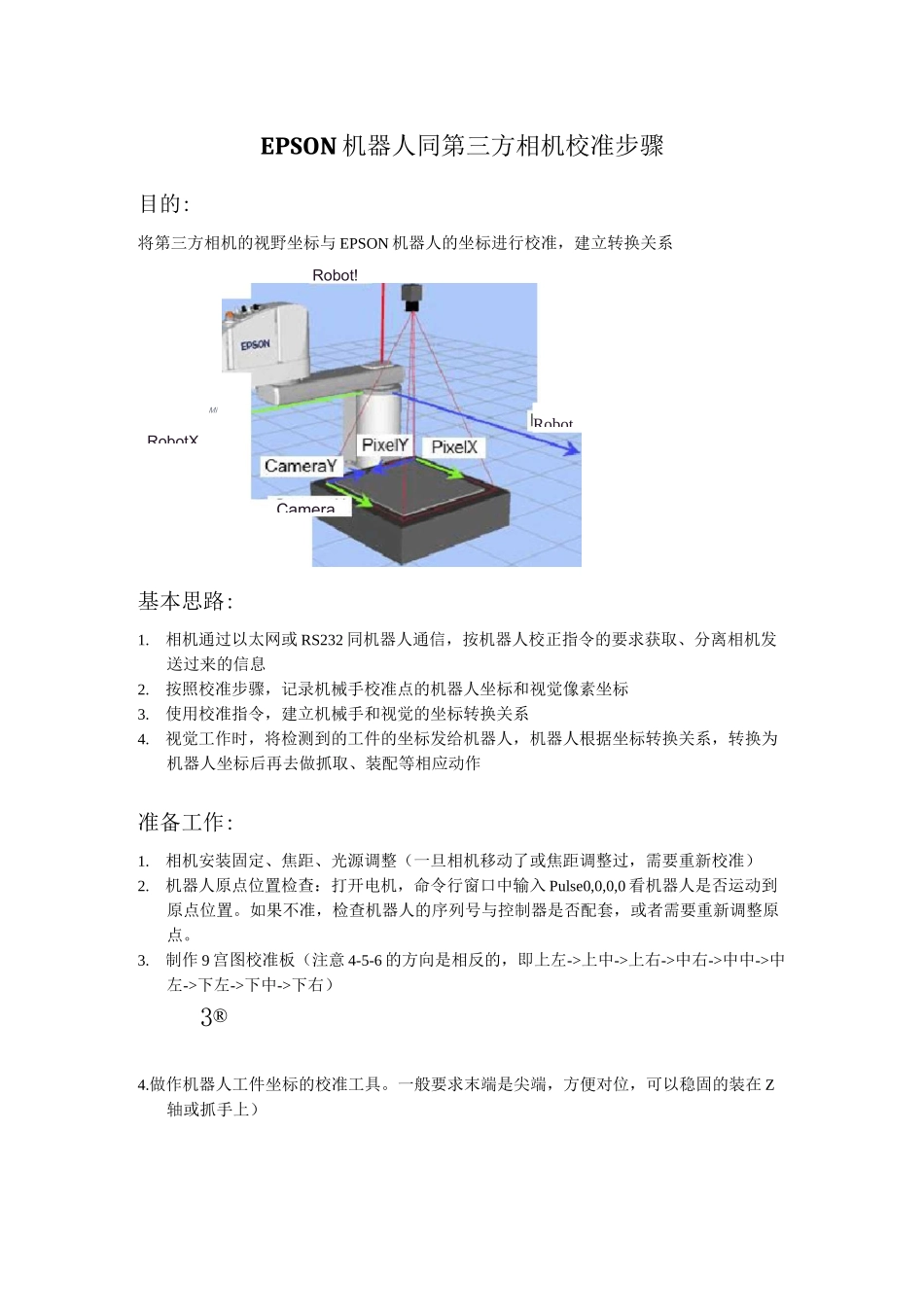
MiRobotX3®EPSON 机器人同第三方相机校准步骤目的:将第三方相机的视野坐标与 EPSON 机器人的坐标进行校准,建立转换关系Robot
基本思路:1
相机通过以太网或 RS232 同机器人通信,按机器人校正指令的要求获取、分离相机发送过来的信息2
按照校准步骤,记录机械手校准点的机器人坐标和视觉像素坐标3
使用校准指令,建立机械手和视觉的坐标转换关系4
视觉工作时,将检测到的工件的坐标发给机器人,机器人根据坐标转换关系,转换为机器人坐标后再去做抓取、装配等相应动作准备工作:1
相机安装固定、焦距、光源调整(一旦相机移动了或焦距调整过,需要重新校准)2
机器人原点位置检查:打开电机,命令行窗口中输入 Pulse0,0,0,0 看机器人是否运动到原点位置
如果不准,检查机器人的序列号与控制器是否配套,或者需要重新调整原点
制作 9 宫图校准板(注意 4-5-6 的方向是相反的,即上左->上中->上右->中右->中中->中左->下左->下中->下右)4
做作机器人工件坐标的校准工具
一般要求末端是尖端,方便对位,可以稳固的装在 Z轴或抓手上)RobotCamera相机安装方式:相机安装方式有以下几种:1 独立安装(相机坐标与机械手坐标不需要相互转换)2 固定安装(固定向上、固定向下)3 移动相机(J2 轴移动,J4 轴移动,J5J6 轴移动)安装方式比较:使用固定安装,相机无法移动,拍摄范围小;但是视觉检测的时间一般可以用机器人工作的时间并列运行,节省节拍时间,精度相对较高
使用移动相机,相机跟随机器人移动,可以拍摄的范围大;但是视觉进行检测前,机器人必须有一定的静止时间(0
5s);视觉进行检测时,机器人一般需要停止不动,不能进行其他工作;整体节拍时间会更长
因为机器人本身有定位精度,使用移动相机时,视觉检测的精度一般也比使用固定相机的低
校准步骤:每