8199-2
1667i-0
0145+0
9873i-0
0145-0
9873iG=tf([1,12],[1,23,242,1220,1000]);rlocus(G);[k,r]=rlocfind(GG_c=feedback(G,1)step(G_cnum=[112]的根轨迹的绘制:Aci
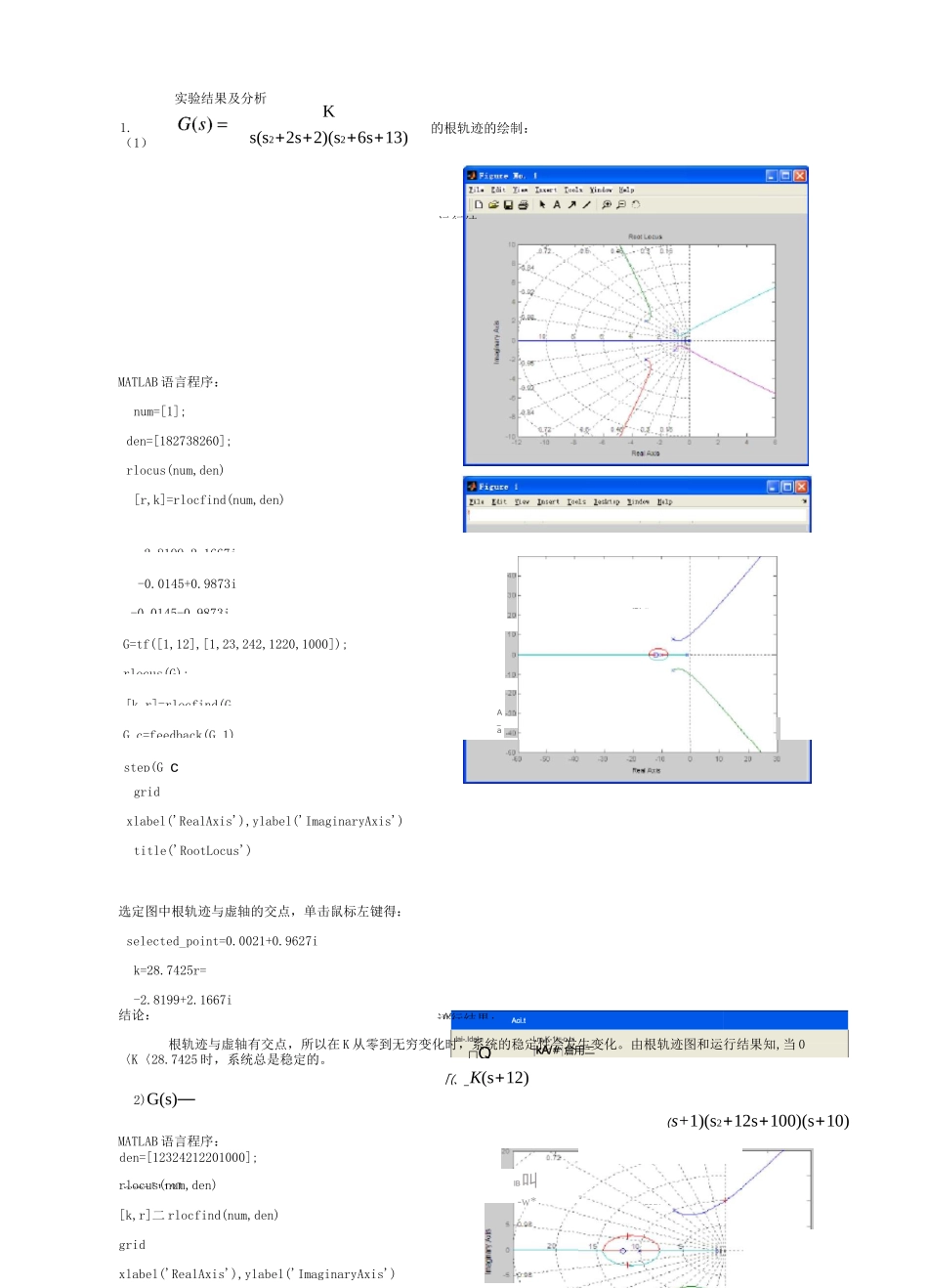
K-1IE-DJX□Q|kA/#|倉用二MATLAB 语言程序:num=[1];den=[182738260];rlocus(num,den)[r,k]=rlocfind(num,den)gridxlabel('RealAxis'),ylabel('ImaginaryAxis')title('RootLocus')选定图中根轨迹与虚轴的交点,单击鼠标左键得:selected_point=0
0021+0
9627ik=28
7425r=-2
8199+2
1667i结论:根轨迹与虚轴有交点,所以在 K 从零到无穷变化时,系统的稳定性会发生变化
由根轨迹图和运行结果知,当 0〈K〈28
7425 时,系统总是稳定的
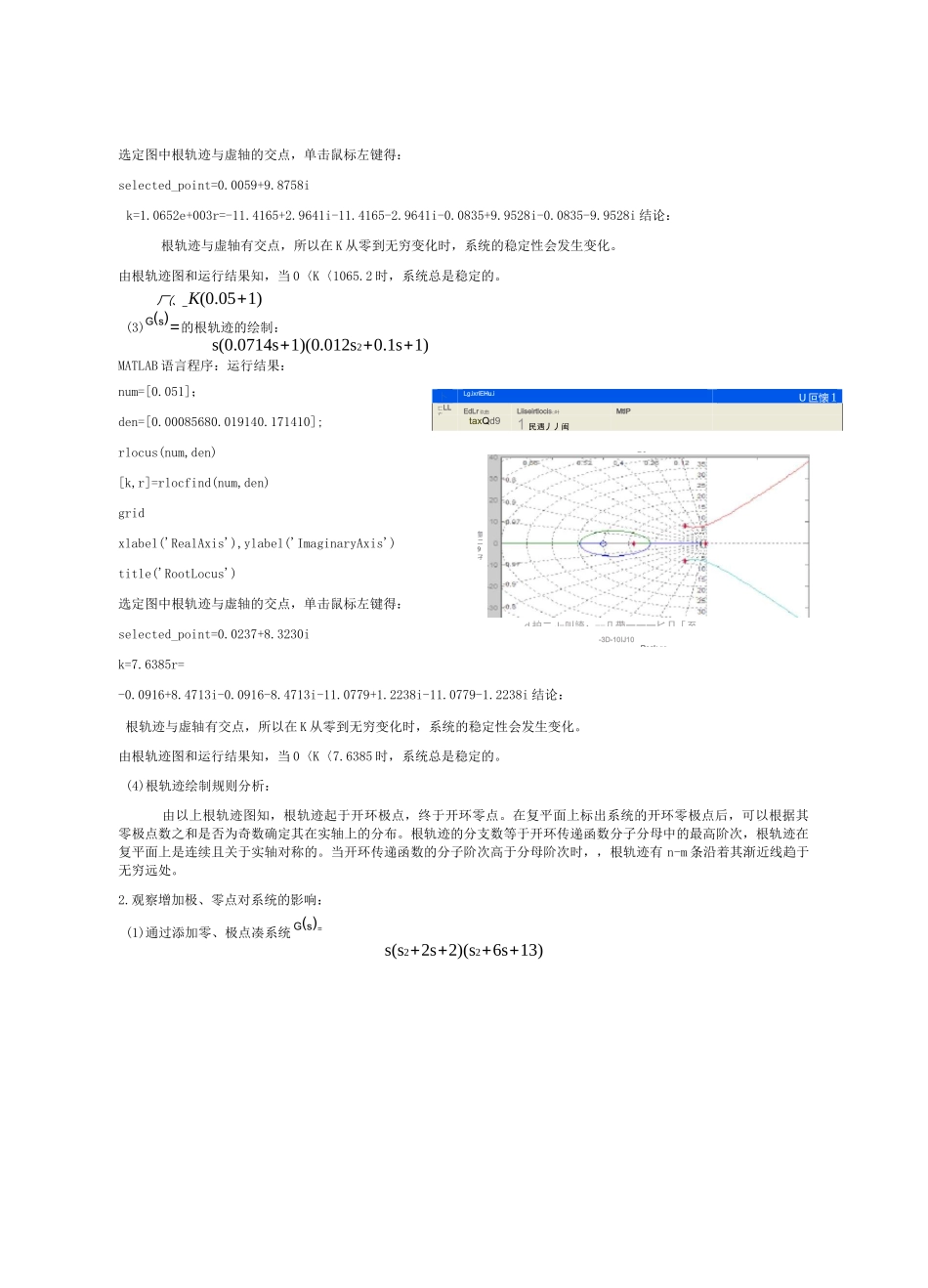
「(、_K(s+12)2)G(s)—(s+1)(s2+12s+100)(s+10)MATLAB 语言程序:运行结实验结果及分析A_a1
(1)IDiotLOTUSKs(s2+2s+2)(s2+6s+13)RDflitLc 匚的根轨迹的绘制:运行结果:den=[12324212201000];rlocus(num,den)[k,r]二 rlocfind(num,den)gridxlabel('RealAxis'),ylabel('ImaginaryAxis')IB叫-w*WORD 格式--可编辑--专业资料,选定图中根轨迹与虚轴的交点,单击