毕 业 设 计题 目 介入手术医疗机器人末端 执行器设计 1 前言随着社会的进步和科技水平的不断提高,人类对自身的健康给予了越来越多的关注
这使得医生不仅要在传统生理医学有所成就,还要学习应用医疗机器人,这为医疗机器人的讨论提供了客观条件
微创医疗机器人具有手术创伤小、痛苦少、操作方便、定位精度高等优点,因此得到了宽阔医生的认可,具有宽阔的应用前景[1]
据世界卫生组织调查统计,心脑血管疾病是人类疾病死亡的第一“杀手”,我国每年死于这类疾病的患者有300多万
因而血管介入手术的进展对患者来说至关重要
血管介入手术:医生在血管造影成像(DSA)系统[2]的引导下,操控导管在人体血管内运动,达到栓塞畸形血管、溶解血栓和扩张狭窄血管等治疗目的
介入医学与外科学、内科学并称为三大医疗技术,是医学中最年轻而又进展最快的一门学科
传统的血管介入手术需要医生徒手操作:稳定性差,手工操作抖动;X-Ray辐射,平均照射时间17分钟;间断性监控具有潜在性风险;操作技巧性强,培训时间长等种种因素影响患者生存质量,限制了血管介入手术的广泛应用
先进的血管介入手术由机器人辅助操作: 运动精度、定位精度高;刚性、稳定性好;远程操作,避开辐射;利用VR技术,开展培训
因此讨论介入手术医疗机器人对于宽阔心血管疾病患者来说具有重要的意义
2 课题综述2
1 介入手术医疗机器人的讨论意义随着科技的不断进步,医疗技术也在不断的进展,现代的外科手术是朝着无创、微创方向进展,介入手术代替了过去的“开放式”手术,实现了微小创伤的治疗
但是传统的血管介入手术需要医生徒手操作,有时间长,辐射大,培训成本高等缺点,严重影响了患者的生存质量
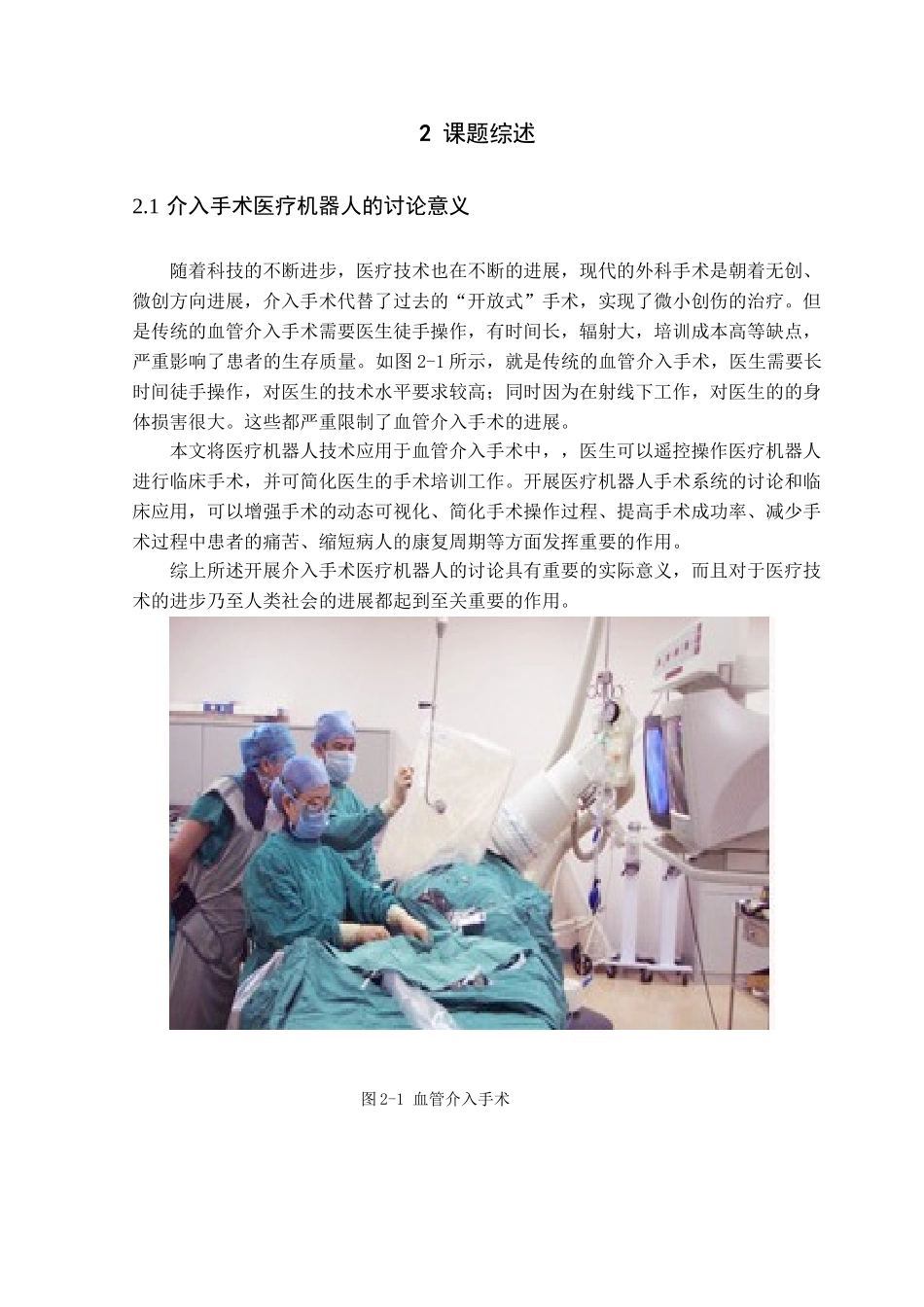
如图 2-1 所示,就是传统的血管介入手术,医生需要长时间徒手操作,对医生的技术水平要求较高;同时因为在射线下工作,对医生的的身体损害很大
这些都严重限制了血管介入手术的进展