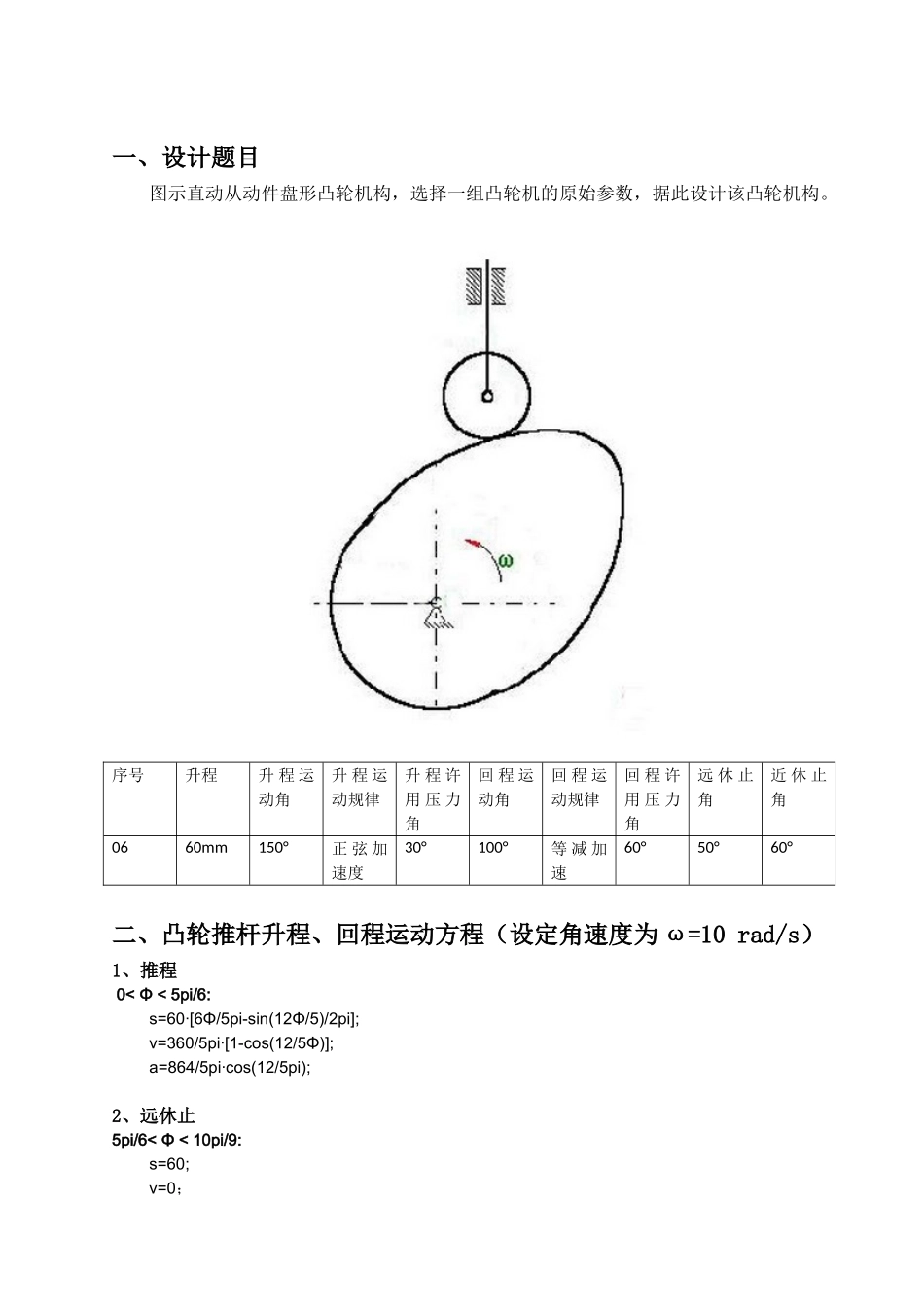
Harbin Institute of TechnologyHarbin Institute of Technology机械原理大作业(二)作业名称: 凸轮机构设计 作业题号: 06 院系: 机械设计制造及其自动化 班级: 班 姓名: 学号: 指导老师: 一、设计题目 图示直动从动件盘形凸轮机构,选择一组凸轮机的原始参数,据此设计该凸轮机构
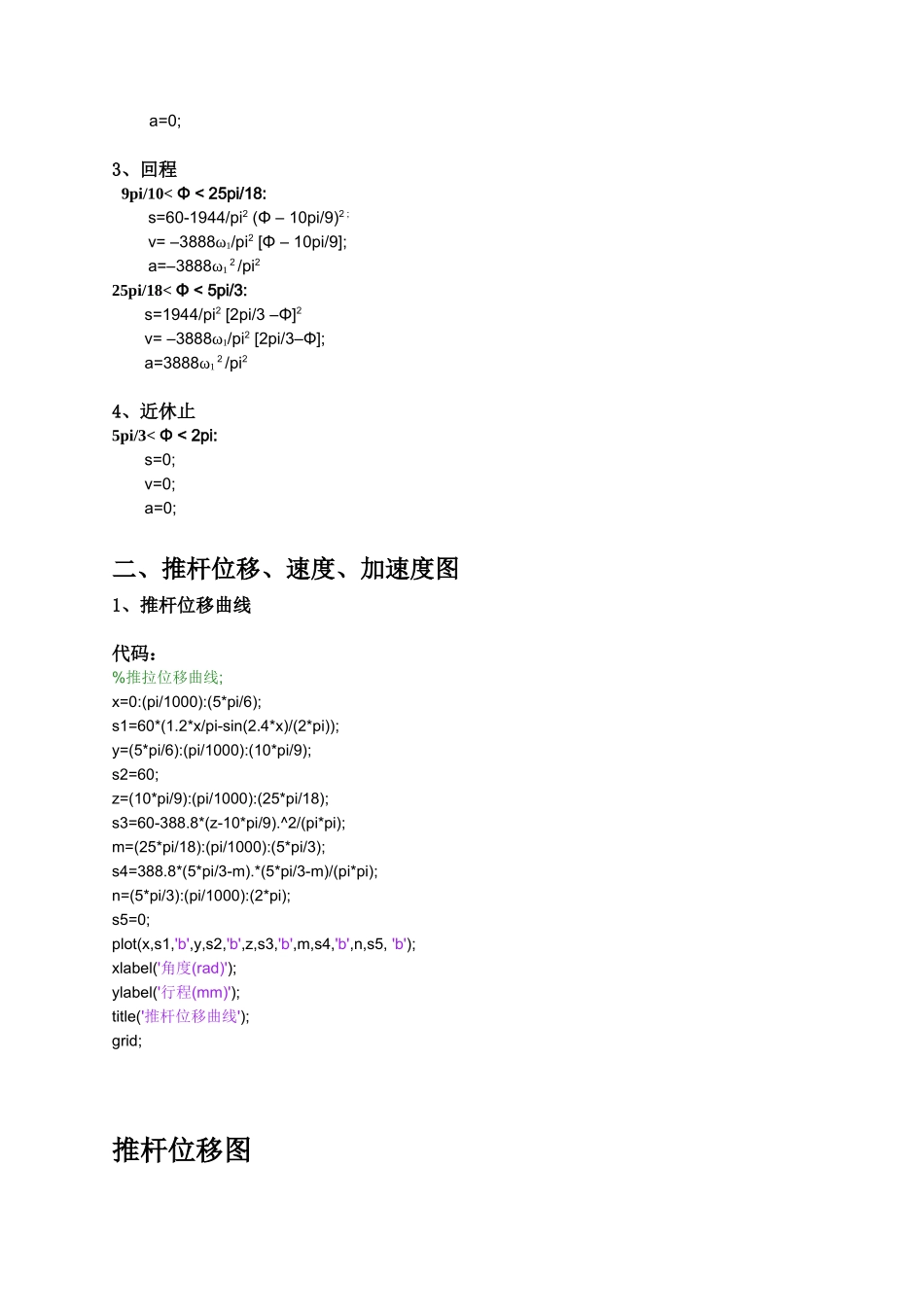
序号升程升 程 运动角升 程 运动规律升 程 许用 压 力角回 程 运动角回 程 运动规律回 程 许用 压 力角远 休 止角近 休 止角0660mm150°正 弦 加速度30°100°等 减 加速60°50°60°二、凸轮推杆升程、回程运动方程(设定角速度为 ω=10 rad/s)1、推程 0< Φ < 5pi/6:s=60·[6Φ/5pi-sin(12Φ/5)/2pi];v=360/5pi·[1-cos(12/5Φ)];a=864/5pi·cos(12/5pi);2、远休止 5pi/6< Φ < 10pi/9:s=60;v=0;a=0;3、回程 9pi/10< Φ < 25pi/18:s=60-1944/pi2 (Φ – 10pi/9)2 ;v= –3888ω1/pi2 [Φ – 10pi/9];a=–3888ω1 2 /pi2 25pi/18< Φ < 5pi/3:s=1944/pi2 [2pi/3 –Φ]2v= –3888ω1/pi2 [2pi/3–Φ];a=3888ω1 2 /pi24、近休止 5pi/3< Φ < 2pi:s=0;v=0;a=0;二、推杆位移、速度、加速度图1、推杆位移曲线代码:%推拉位移曲线; x=0:(pi/1000):(5*pi/6); s1=60*(1
2*x/pi-sin(2
4*x)/(2*pi)); y=(5*pi/6):(pi/1000):(10*pi/9); s2=60; z=(10*pi/9