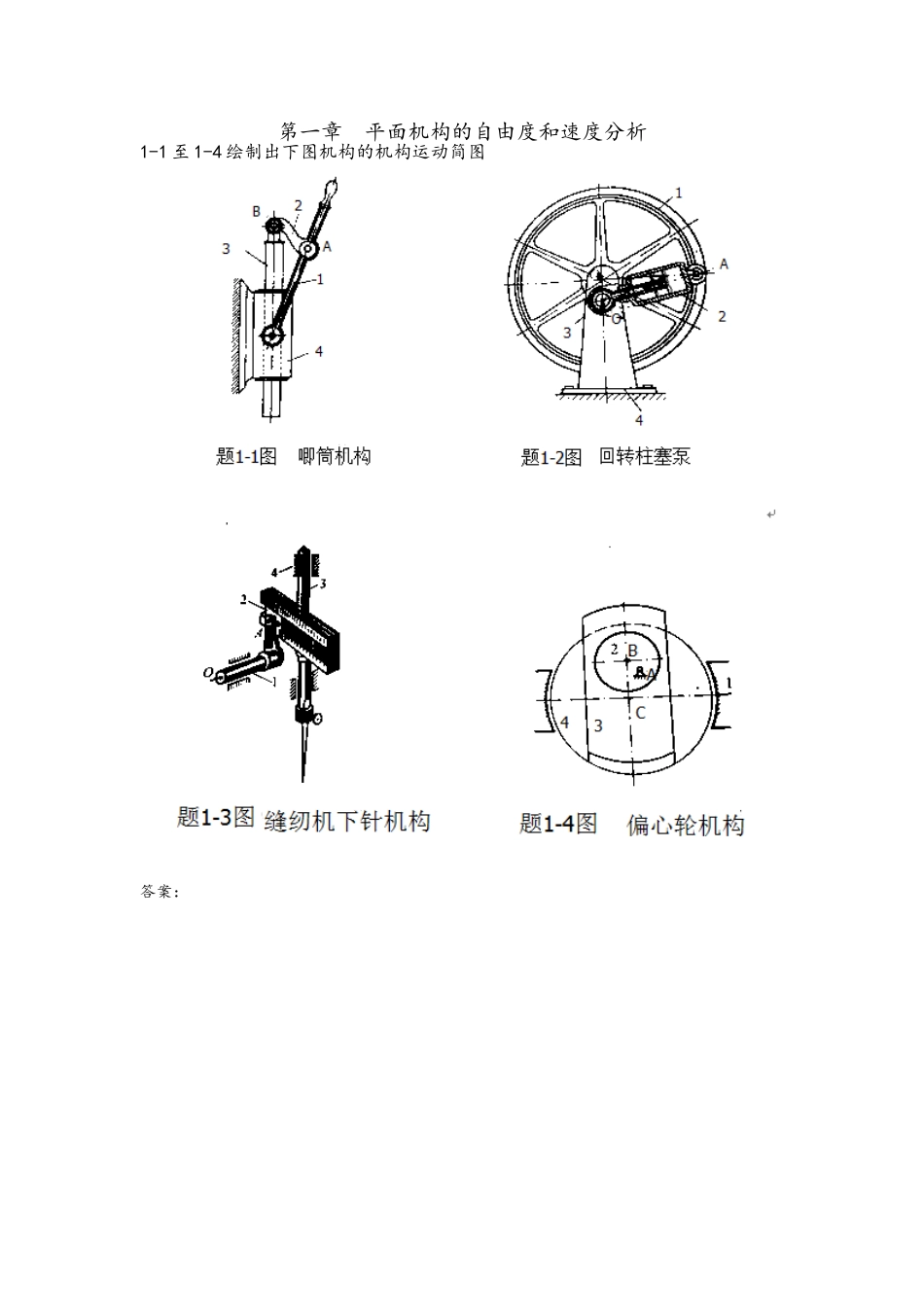
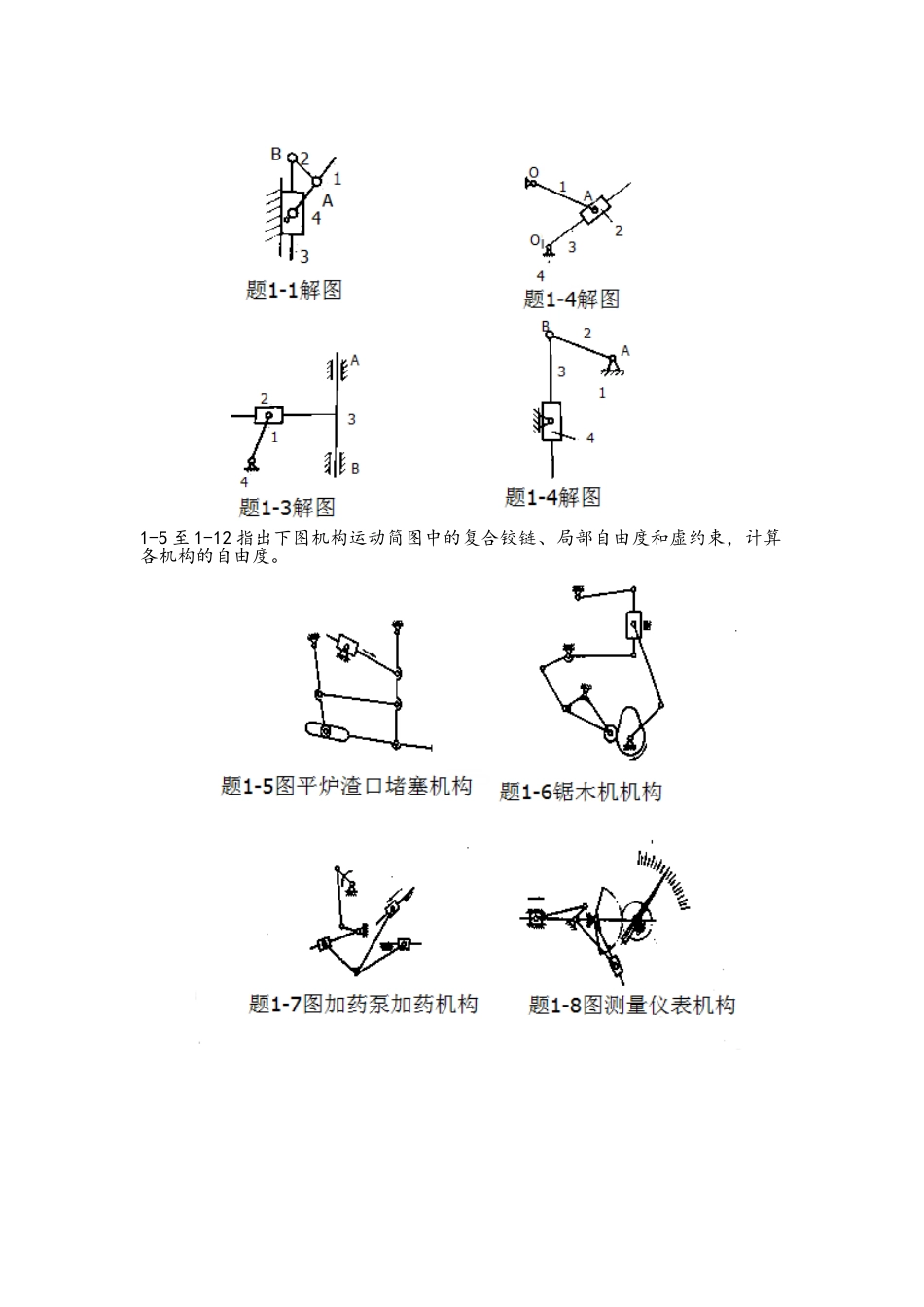
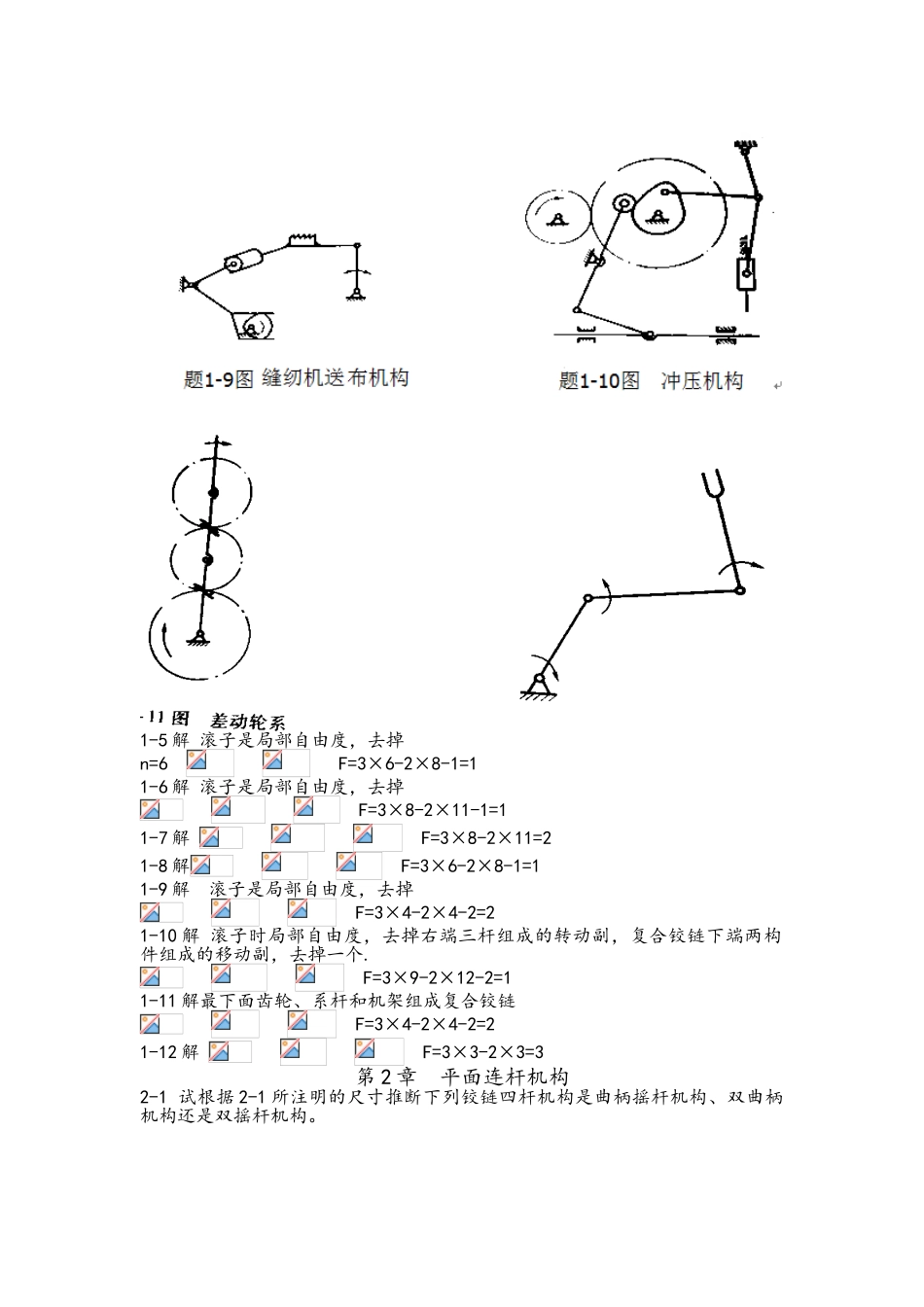
第一章 平面机构的自由度和速度分析1-1 至 1-4 绘制出下图机构的机构运动简图答案:1-5 至 1-12 指出下图机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度。1-5 解 滚子是局部自由度,去掉n=6 F=3×6-2×8-1=11-6 解 滚子是局部自由度,去掉 F=3×8-2×11-1=11-7 解 F=3×8-2×11=21-8 解 F=3×6-2×8-1=11-9 解 滚子是局部自由度,去掉 F=3×4-2×4-2=21-10 解 滚子时局部自由度,去掉右端三杆组成的转动副,复合铰链下端两构件组成的移动副,去掉一个. F=3×9-2×12-2=11-11 解最下面齿轮、系杆和机架组成复合铰链 F=3×4-2×4-2=21-12 解 F=3×3-2×3=3第 2 章 平面连杆机构2-1 试根据 2-1 所注明的尺寸推断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。(a)40+110<90+70 以最短的做机架,时双曲柄机构,A B 整转副(b)45+120<100+70 以最短杆相邻杆作机架,是曲柄摇杆机构,A B 整转副(c)60+100>70+62 不存在整转副 是双摇杆机构(d)50+100<90+70 以最短杆相对杆作机架,双摇杆机构 C D 摆转副2-3 画出题 2-3 图所示各机构的传动角和压力角。图中标注箭头的构件为原动件。10.如题 10 图所示四杆机构中,若原动件为曲柄,试标出在图示位置时的传动角 γ 及机构处于最小传动角时的机构位置图。解:为时的机构位置。11.在题 11 图所示的摆动导杆机构中,构件 1 为主动件,构件 3 为从动件,试在图中画出该机构的极位夹角 θ解:如题 11 解图所示12.如图 12 所示四杆机构中,若远动间为曲柄,试标出在图示位置时传动角 γ及机构处于最小传动角时的机构位置图解:为时机构位置第 3 章 凸轮机构 14.设计一个对心直动尖顶从动件盘型凸轮机构的凸轮廓线,已知凸轮顺时针方向转动,基圆半径=25mm,从动件行程 h=25mm。其运动规律如下:凸轮转角为 0°~120°时从动件等速上升到最高点;凸轮转角为 120°~180°时,从动件在最高位置停止不动;凸轮转角为 180°~300°时,从动件等速下降到最低点;凸轮转角为 300°~360°时,从动件在最低位置不动。()齿轮机构4-2 已知一对外啮合标准直齿圆柱齿轮的标准中心距 a=160mm,齿数 z1=20,z2=60,求模数和分度圆直径。(1)a=(d1+d2)/2=(z1+z2)m/2=160 解得 m=4(2) d1=mz1=4*20=80; d2=mz2=4*60=240轮系5-1 在图所示双级蜗轮传动中,已知右旋蜗杆 1 的转向如图所示,试推断蜗轮 2...