MATLAB 仿真实现 LMS 和 RLS 算法题目: 序列 x(n)有 AR(2)模型产生:,w(n)是均值为 0、方差为 1 的高斯白噪声序列
用 LMS 算法和 RLS 算法来估量模型参数
根据课本第三章 63 页的要求,仿真实现 LMS 算法和 RLS 算法,比较两种算法的权值收敛速度,并对比不同 u 值对 LMS 算法以及 λ 值对 RLS 算法的影响
解答:1 数据模型(1)高斯白噪声用用 randn 函数产生均值为 0、方差为 1 的标准正态分布随机矩阵来实现
随后的产生的信号用题目中的 AR(2)模型产生,激励源是之前产生的高斯白噪声
(2)信号点数这里取为 2000,用 2000 个信号来估量滤波器系数
(3) 分 别 取 3 个 不 同 的 u 、 λ 值 来 分 析 对 不 同 算 法 对 收 敛 效 果 的 影 响
其 中u=[0
006],lam=[1,0
2 算法模型2
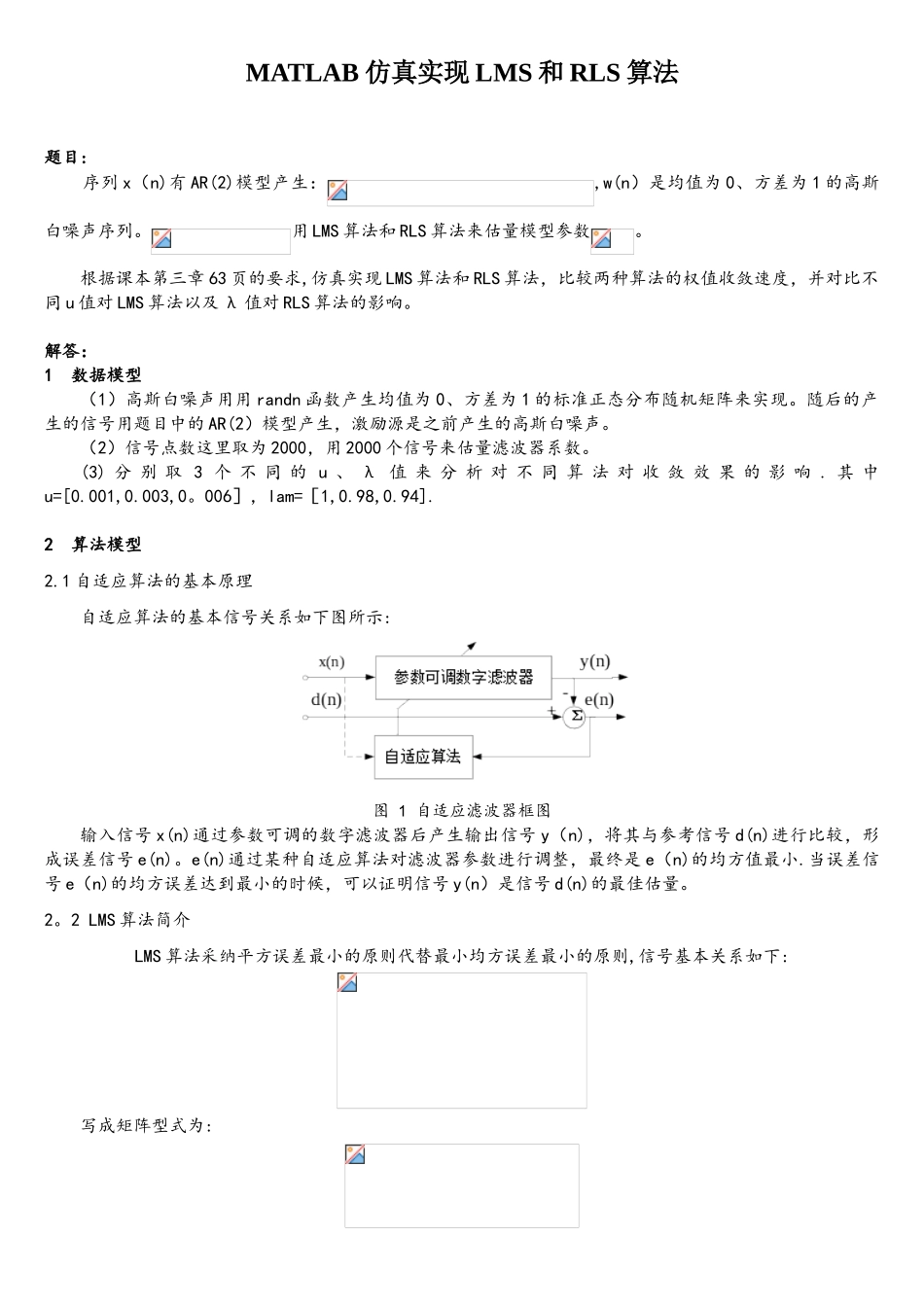
1 自适应算法的基本原理自适应算法的基本信号关系如下图所示:图 1 自适应滤波器框图输入信号 x(n)通过参数可调的数字滤波器后产生输出信号 y(n),将其与参考信号 d(n)进行比较,形成误差信号 e(n)
e(n)通过某种自适应算法对滤波器参数进行调整,最终是 e(n)的均方值最小
当误差信号 e(n)的均方误差达到最小的时候,可以证明信号 y(n)是信号 d(n)的最佳估量
2 LMS 算法简介LMS 算法采纳平方误差最小的原则代替最小均方误差最小的原则,信号基本关系如下:写成矩阵型式为:式中,W(n) 为 n 时刻自适应滤波器的权矢量,,N 为自适应滤波器的阶 数 ; X ( n) 为 n 时 刻 自 适 应 滤 波 器 的 参 考 输 入 矢 量 , 由 最 近 N 个 信 号 采 样 值 构 成 ,;d ( n) 是期