工业机器人选型的 9 大参数By Mathieu人们常常讨论“机器人”
首先,对于工业自动化的行业外人士来说,要澄清的是工厂使用的“机器人”绝对不是类似的我的机器人女友中的类人机器人
对于自动化行业的老鸟,资深的机、电工程师来说,选择合适的“机器人”也许是一个简单的工作
但是对于那些第一次准备购买、导入机器人的设计人员或工厂来说,也许会有些迷茫
下面从 9 个专业的参数方面,讨论如何选择一个合适的工业机器人
应用场合首先,最重要的源头是评估导入的机器人,是用于怎样的应用场合以及什么样的制程
l若是应用制程需要在人工旁边由机器协同完成,对于通常的人机混合的半自动线,特别是需要常常变换工位或移位移线的情况,以及配合新型力矩感应器的场合,协作型机器人(Cobots)应该是一个很好的选项
l假如是寻找一个紧凑型的取放(Pick & Place)料机器人,你可能想选择一个水平关节型机器人(Scara)
l假如是寻找针对小型物件,快速取放的场合,并联机器人(Delta)最适合这样的需求
工厂里指代的“机器人”l接下来的讨论,我们将针对垂直关节多轴机器人(Multi-axis)
这种机器人可以适应一个非常大范围的应用
从取、放料到码垛,以及喷涂,去毛刺,焊接等专用制程
现在,工业机器人制造商基本上针对每一种应用制程都有相应的机器人方案
你所做的只需要明确你希望机器人为你做哪个工作,以及从不同的种类当中,选择最适合的型号
有效负载 有效负载是,机器人在其工作空间可以携带的最大负荷
从例如 3Kg 到 1300Kg 不等
假如你希望机器人完成将目标工件从一个工位搬运到另一个工位,需要注意将工件的重量以及机器人手爪的重量加总到其工作负荷
另外特别需要注意的是机器人的负载曲线,在空间范围的不同距离位置,实际负载能力会有差异
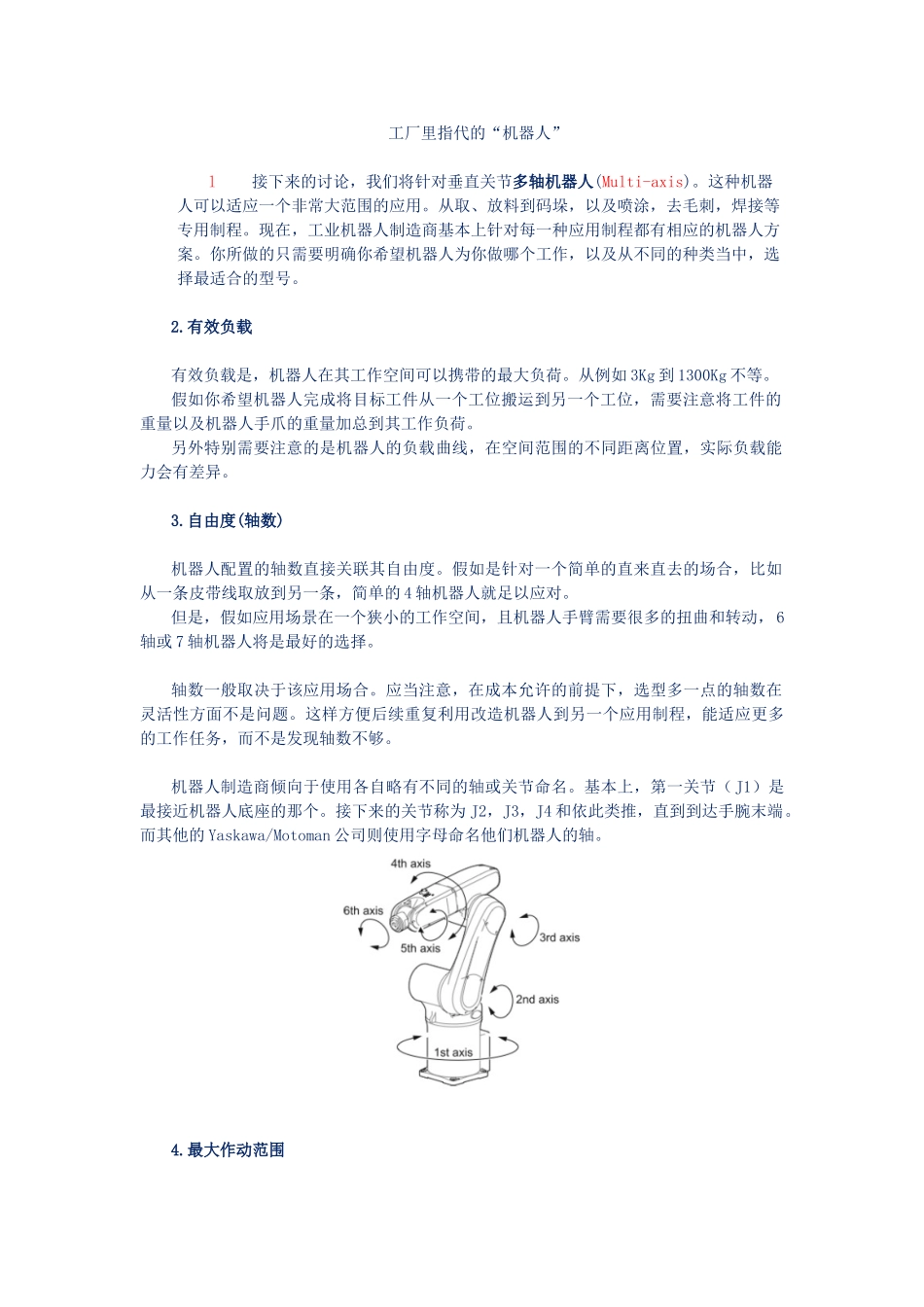
自由度(轴数) 机器人配置的轴数直接关联其自由度