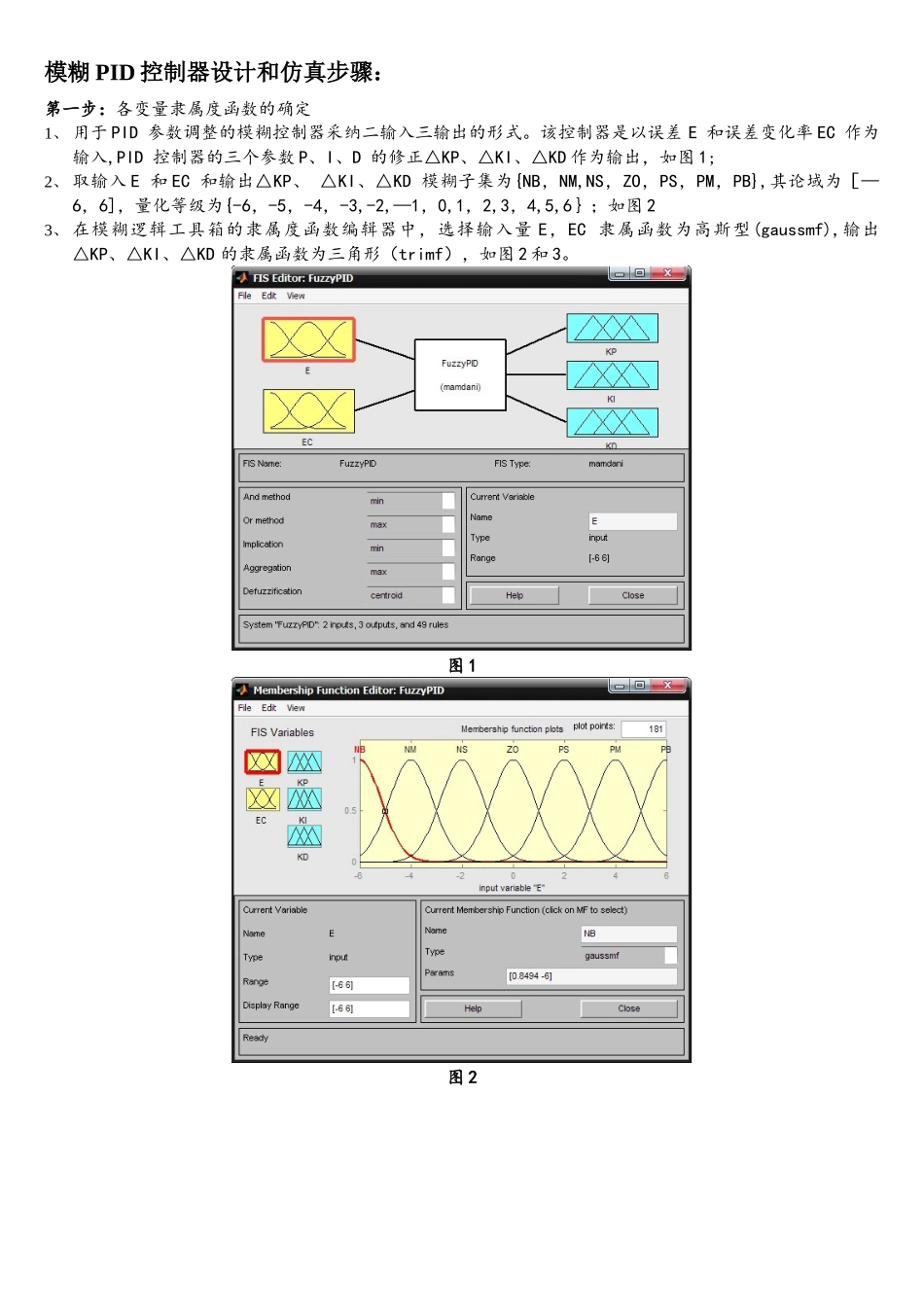
模糊 PID 控制器设计和仿真步骤:第一步:各变量隶属度函数的确定1、 用于 PID 参数调整的模糊控制器采纳二输入三输出的形式
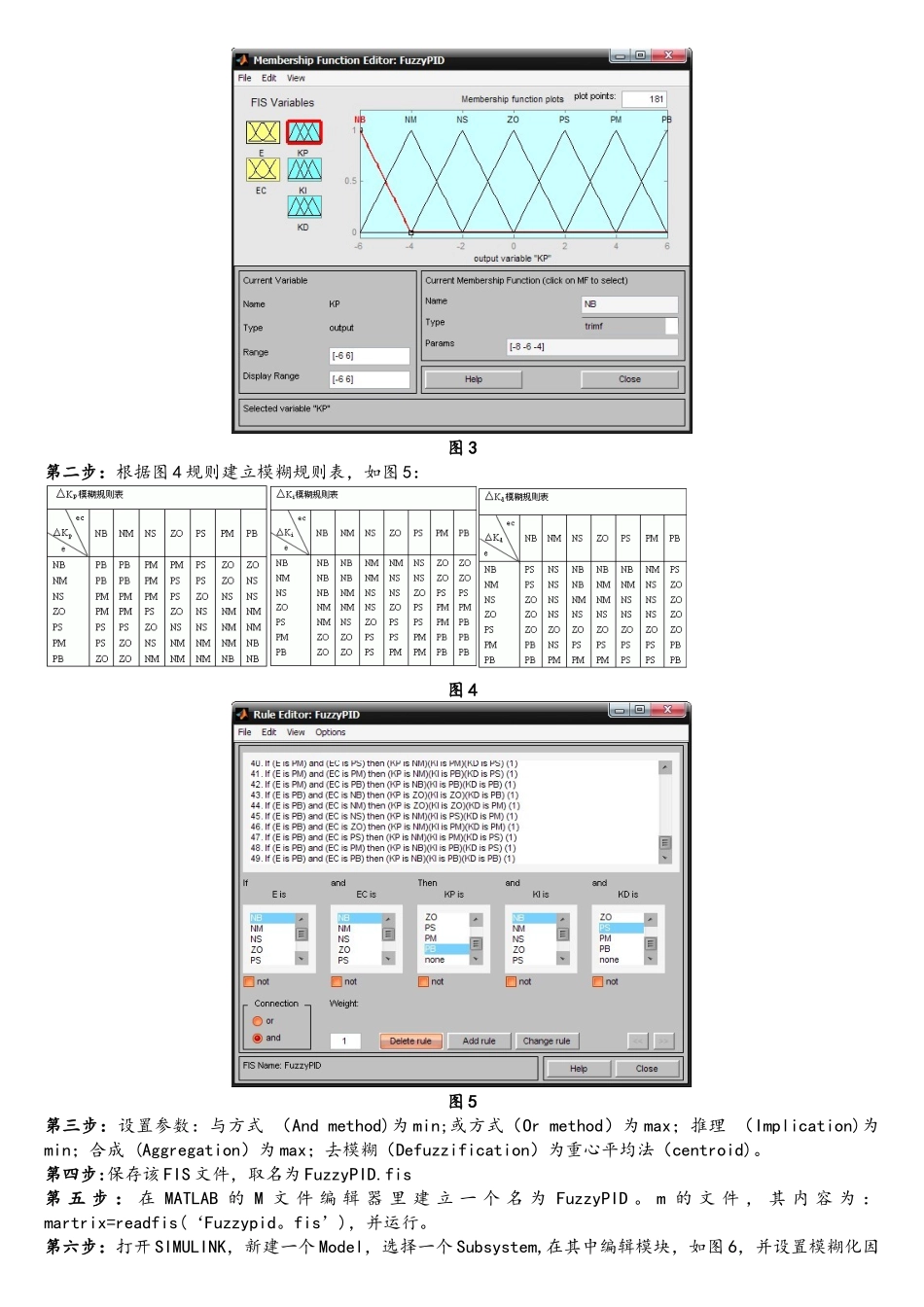
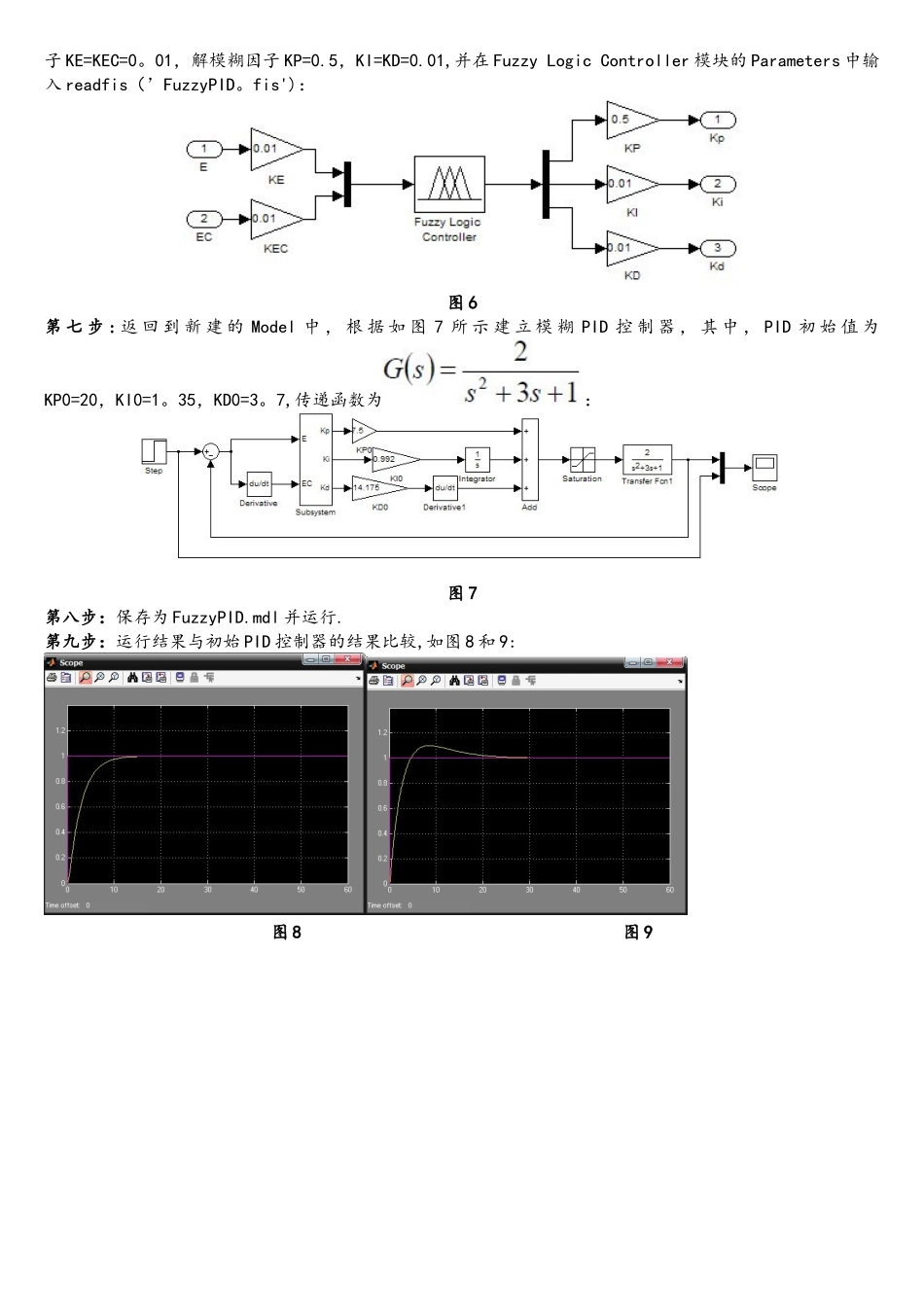
该控制器是以误差 E 和误差变化率 EC 作为输入,PID 控制器的三个参数 P、I、D 的修正△KP、△KI、△KD 作为输出,如图 1;2、 取输入 E 和 EC 和输出△KP、 △KI、△KD 模糊子集为{NB,NM,NS,ZO,PS,PM,PB},其论域为[—6,6],量化等级为{-6,-5,-4,-3,-2,—1,0,1,2,3,4,5,6};如图 23、 在模糊逻辑工具箱的隶属度函数编辑器中,选择输入量 E,EC 隶属函数为高斯型(gaussmf),输出△KP、△KI、△KD 的隶属函数为三角形(trimf),如图 2 和 3
图 1图 2图 3第二步:根据图 4 规则建立模糊规则表,如图 5:图 4图 5第三步:设置参数:与方式 (And method)为 min;或方式(Or method)为 max;推理 (Implication)为min;合成 (Aggregation)为 max;去模糊(Defuzzification)为重心平均法(centroid)
第四步:保存该 FIS 文件,取名为 FuzzyPID
fis第 五 步 : 在 MATLAB 的 M 文 件 编 辑 器 里 建 立 一 个 名 为 FuzzyPID
m 的 文 件 , 其 内 容 为 :martrix=readfis(‘Fuzzypid
fis’),并运行
第六步:打开 SIMULINK,新建一个 Model,选择一个 Subsystem,在其中编辑模块,如图 6,并设置模糊化因子 KE=KEC=0
01,解模糊因子 KP=0
5,KI=KD=0
01,并在 Fuzzy Logic Controller 模块的 Parameters 中输入 read