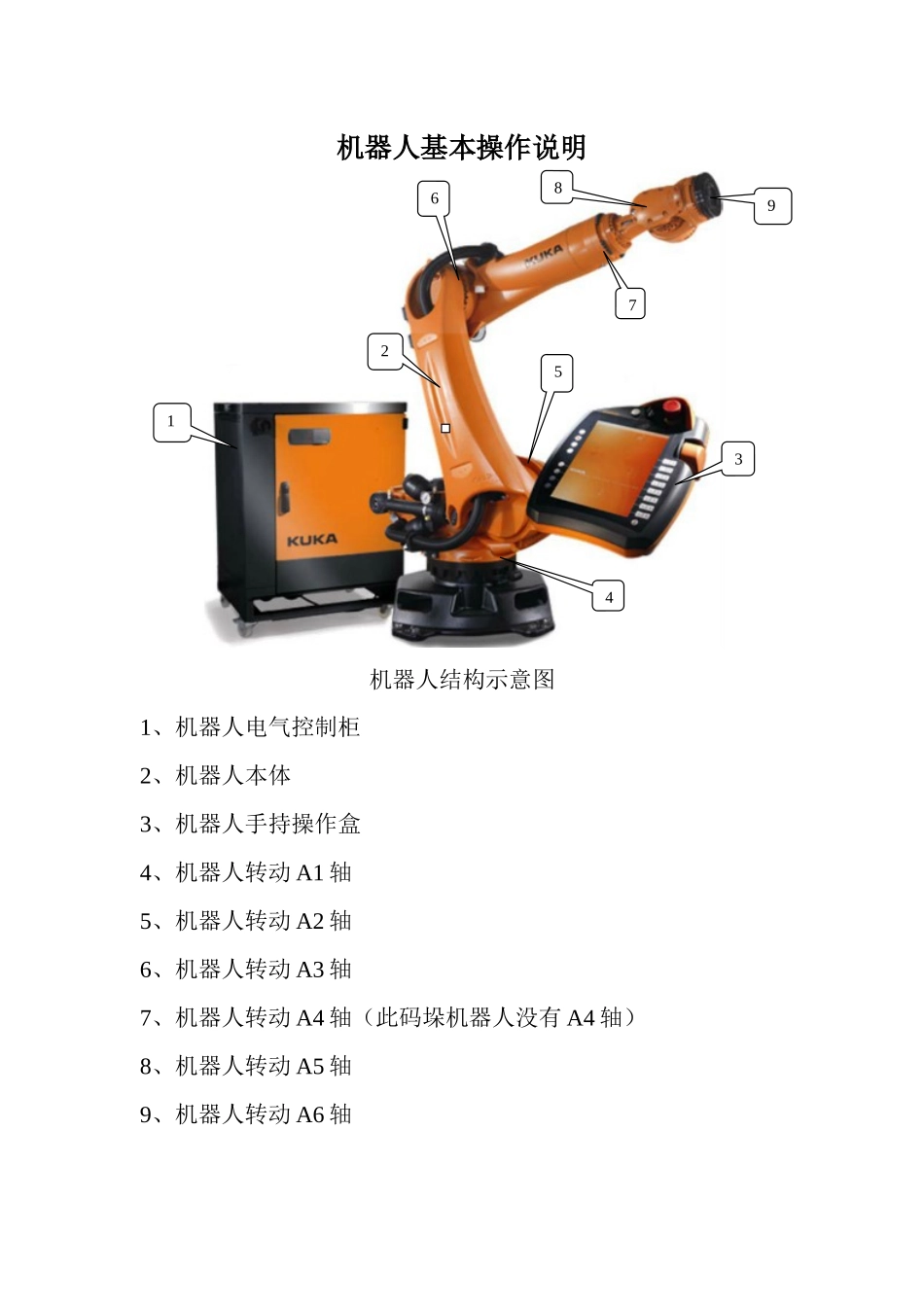
机器人基本操作说明机器人结构示意图1、机器人电气控制柜2、机器人本体3、机器人手持操作盒4、机器人转动 A1 轴5、机器人转动 A2 轴6、机器人转动 A3 轴7、机器人转动 A4 轴(此码垛机器人没有 A4 轴)8、机器人转动 A5 轴9、机器人转动 A6 轴987654321·机器人电器柜KUKA 机器人电器柜内部,计算机、伺服控制器,安全模块之间为总线连接
主要需要保护部分配有熔断丝,假如烧坏,请参照机器人说明书进行更换
另外,机器人系统与码垛系统的 PLC 及其分布 I/O 之间为EtherNet/IP 总线连接进行通讯
·机器人手持盒(smartPAD) KUKA 机器人的操作通过手持操作器(即 KUKA smartPAD)进行操作机器人手持盒(smartPAD)SmartPAD 说明:·电容式触摸屏,用手或者配备的触摸笔操作·大尺寸竖型触摸屏·KUKA 菜单键·八个移动键·操作工艺数据包的按键·用于程序运行的按键(停止/向前/向后)·显示键盘的按键·更换运行方式的钥匙开关·紧急停止按键·3D 鼠标·可拔出 USB 接口1、用于拔下 smartPAD 按钮2、用于调出连接管理器的钥匙开关
只有当钥匙插入时方可转动开关
可以通过连接管理器切换运行模式3、紧急停止键
用于在危险情况下关停机器人
紧急停止键在被按下时将自行闭锁4、3D 鼠标
用于手动移动机器人
用于手动移动机器人6、用于设定程序倍率的按键7、用于设定手动倍率的按键 8 8、8、主菜单按键
用来在 smartHMI 上将菜单项显示出来9、工艺键
工艺键主要用于设定工艺程序包中的参数
其确切的功能取决于所安装的工艺程序包10、启动键
通过启动键可启动一个程序11、逆向启动键
用逆向启动键可逆向启动一个程序
程序将逐步运行12、停止键
用停止键可暂停正运行中的程序13、键盘