智能马铃薯清选输送设备说明书一,讨论内容(1)讨论马铃薯清选设备的整机结构设计,及其一级分选装置与二级清选装置的工作原理,两级装置上均采纳液压系统来调整分选角度,以及马铃薯分选轴间距,更能精确可靠的完成工作,探讨各个液压系统之间的配合与伤薯率、纯净率之间的关系,建立相应的数学模型
(2)主输送线采纳的调速电机配合三级减速的托辊式柔性带输送结构,带速可调,上料角度也是可调的,二级清选装置清选辊转速也可以手动调节
讨论接收料斗提升角度、上料速度和清选辊转速跟清选效率、伤薯率、纯净率之间的关系,确定最佳参数配合,保证最大清选量,最低破皮率,最佳分选准确率,最佳清选效果
(3)智能化控制上料的讨论开发,采纳检测堆积厚度的传感器,依据智能化流量监测返回数据控速,最大程度降低马铃薯输运过程的破皮率,上料输运流量控制传感器和载荷自适应系统配合,实现效率、流量和破皮率控制的最优化,避开清选分级机构的物料拥堵
此过程需要依靠大量理论依据和实验进行验证,保证输运效率和马铃薯的破皮率,同时系统应对后续的清选工作具有自适应能力,实现智能化和效率的提升
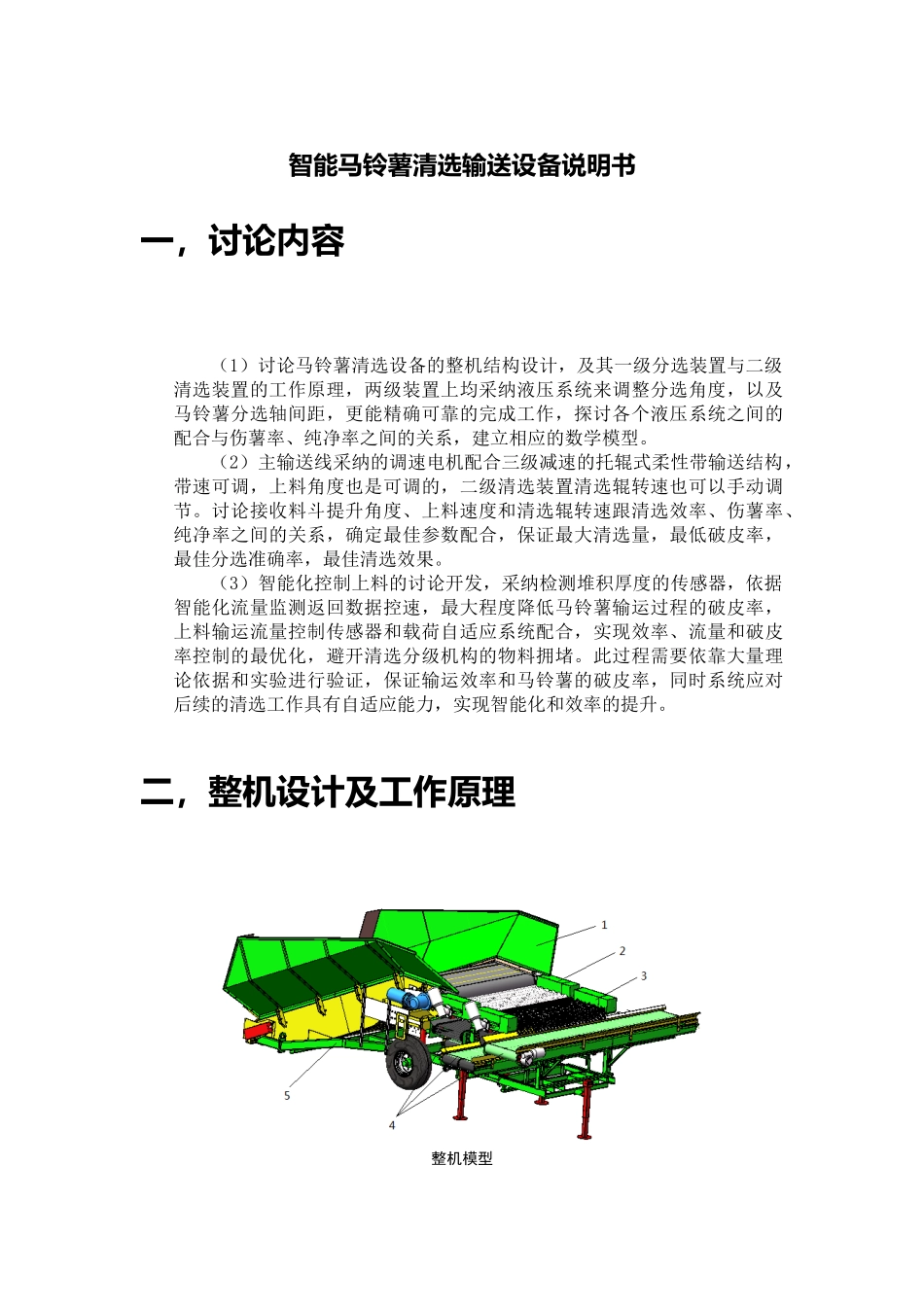
二,整机设计及工作原理整机模型1
接收料斗 2
一级分选装置 3
二级清选装置 4
主机托架马铃薯清选装备整机模型主要分为五大部分 [23]:接收料斗、一级分选装置、二级清选装置、主机托架以及杂物和薯块输送线,如图所示
接收料斗与主机托架通过行程为 200mm,工作压力为 16MPa 的主输送线支撑液压缸连接的,该液压缸用于调节接收料斗的工作角度的,一端通过连接叉耳与一级分选装置活动铰接;一级分选装置的末端与二级清选装置的始端共同固定在可前后活动的连接叉板上,该连接叉板前后移动是通过主机托架上的三角架液压缸来控制的;二级清选装置的末端同样也固定在可前后移动的连接叉板上,并且附有一排挡薯套管;一条小薯输送筛、两条薯块输送线以及一条杂物