发那科机器人视觉成像应用(2D)目录第一部分:视觉设定 3第二部分:视觉偏差角度的读取与应用9应用范围:摄像头不安装在机器人上
第一部分:视觉设定发那科机器人视觉成像(2D-单点成像),为简化操作流程,方便调试,请遵循以下步骤:1、 建立一个新程序,假设程序名为 A1
程序第一行和第二行内容为:UFRAME_NUM=2UTOOL_NUM=2以上两行程序,是为了指定该程序使用的 USER 坐标系和 TOOL 坐标系
此坐标系的序号不应被用作视觉示教时的坐标系
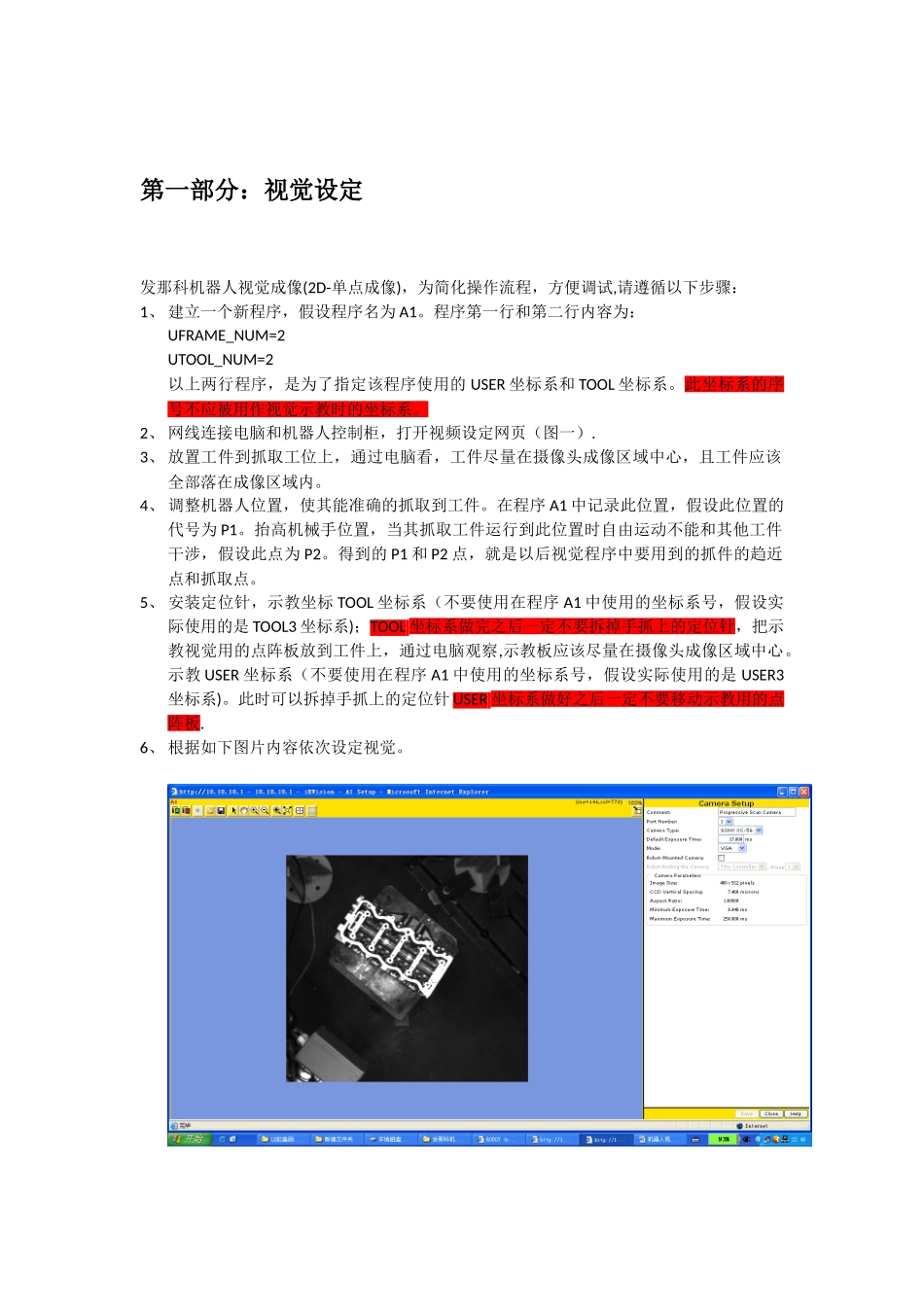
2、 网线连接电脑和机器人控制柜,打开视频设定网页(图一)
3、 放置工件到抓取工位上,通过电脑看,工件尽量在摄像头成像区域中心,且工件应该全部落在成像区域内
4、 调整机器人位置,使其能准确的抓取到工件
在程序 A1 中记录此位置,假设此位置的代号为 P1
抬高机械手位置,当其抓取工件运行到此位置时自由运动不能和其他工件干涉,假设此点为 P2
得到的 P1 和 P2 点,就是以后视觉程序中要用到的抓件的趋近点和抓取点
5、 安装定位针,示教坐标 TOOL 坐标系(不要使用在程序 A1 中使用的坐标系号,假设实际使用的是 TOOL3 坐标系);TOOL 坐标系做完之后一定不要拆掉手抓上的定位针,把示教视觉用的点阵板放到工件上,通过电脑观察,示教板应该尽量在摄像头成像区域中心
示教 USER 坐标系(不要使用在程序 A1 中使用的坐标系号,假设实际使用的是 USER3坐标系)
此时可以拆掉手抓上的定位针 USER 坐标系做好之后一定不要移动示教用的点阵板
6、 根据如下图片内容依次设定视觉
图一:设定照相机(只需要更改),也就是曝光时间,保证:当光标划过工件特征区域的最亮点时,中g=200 左右
其他不要更改
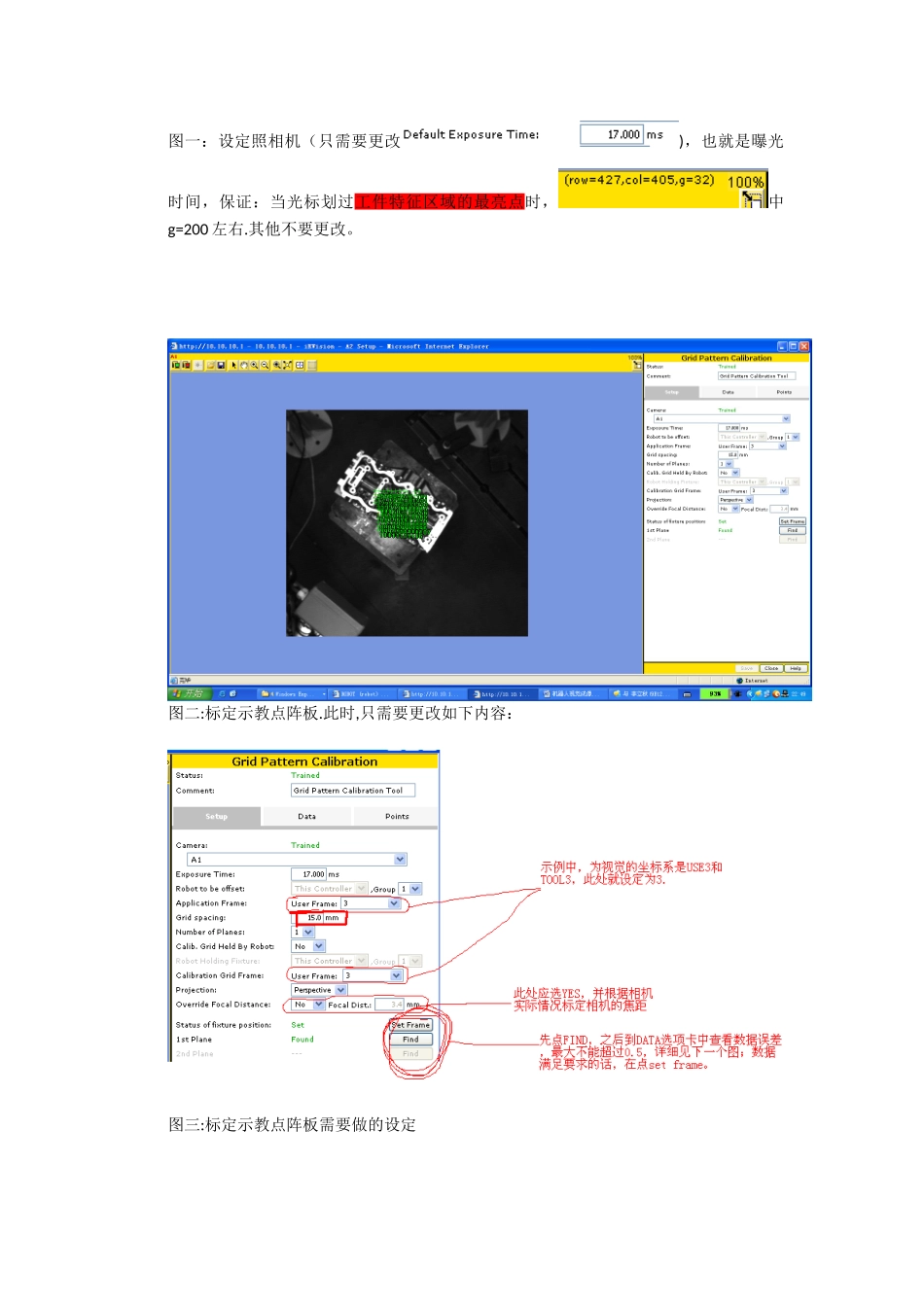
图二:标定示教点阵板
此时,只需要更改如下内容:图三:标定示教点阵板需要做的设定图四: 标定示教点阵板时,观察