目录无人机操控与竞技目录第 1 章 无人机概述第 2 章 无人机安全 第 3 章 模拟飞行第 4 章 微型无人机训练 第 5 章 穿越机训练第 6 章 自动飞行训练第 7 章 无人机智能集群编程飞行技术简介 第 8 章 无人机竞技第 9 章 无人机竞赛规则与标准 第 10 章 职业出路第 11 章 国内主要联盟、俱乐部、战队目录目录第 7 章 无人机智能集群编程飞行技术简介目录第 7 章 无人机智能集群编程飞行技术简介1
无人机编队1
特征1网络化沟通——通过数据链来共享信息,建立一个庞大的数据链,实时共享各种信息,包括地形、风速、目标位置等参数,达到实时传递数据的效果
2自适应协同——集群成员之间做到共享信息:感知彼此方位,自动协调,互相之间不碰撞
3智能化倍增——利用无人机集群庞大的智能数据快速分析、处理能力,使整个系统能高效运转,实现自主判断、自主选择、自主执行
4 应用领域4民用:飞行表演、快递物流、精准农业和应急救灾等
5军事:协同侦察、协同打击、电子协同干扰等
目录第 7 章 无人机智能集群编程飞行技术简介2
无人机智能集群常用学习软件: Scratch 和 Python1
Scratch 的两种模式1普通模式——既可以通过计算机对单架无人机进行编程,实现单架无人机飞行,也可以对多架无人机进行编程,实现编队飞行,如图 7-4 所示
2图形模式——软件内置图形模块,直接将内置的图形调用、变换,对整个图形进行飞行控制,快速实现编程、编队飞行
Scratch 的图形模式飞行前可以进行验证,如图 7-5 所示
目录第 7 章 无人机智能集群编程飞行技术简介7
2 Python 编程语言目录第 7 章 无人机智能集群编程飞行技术简介7
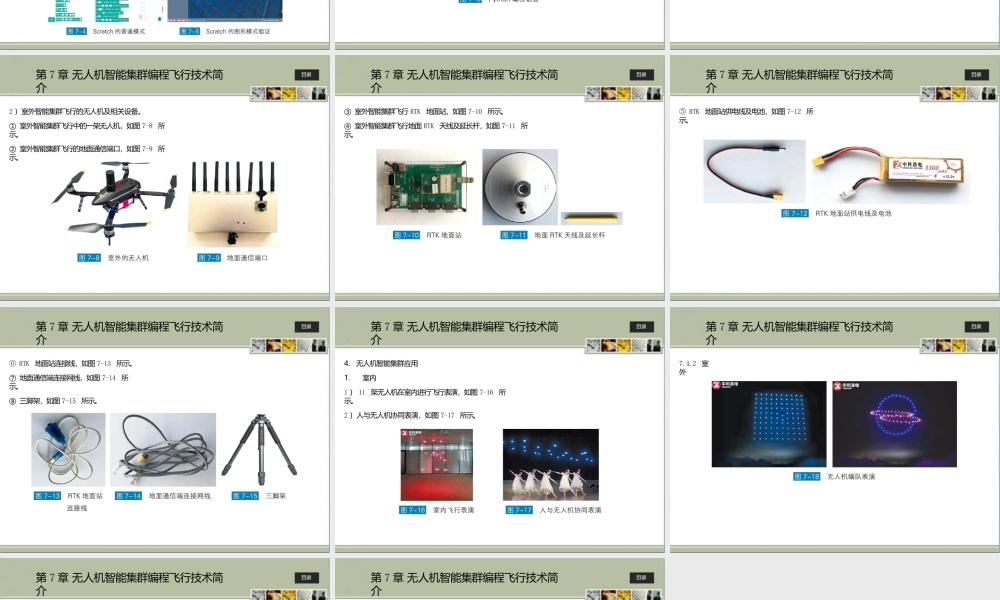
3 无人机智能集群硬件1 )室内智能集群飞行的无人机,如图 7-7 所示
目录第 7 章 无人机智能集群编程