第 20 课 机器人循光学习任务1、导学牌 2、知识屋3、机器人循光的流程图 4、机器人循光的程序5 、知识屋 6 、探究屋 7 、实践园 9 、小结 10 、成果篮 导学牌了解红外传感器的工作原理
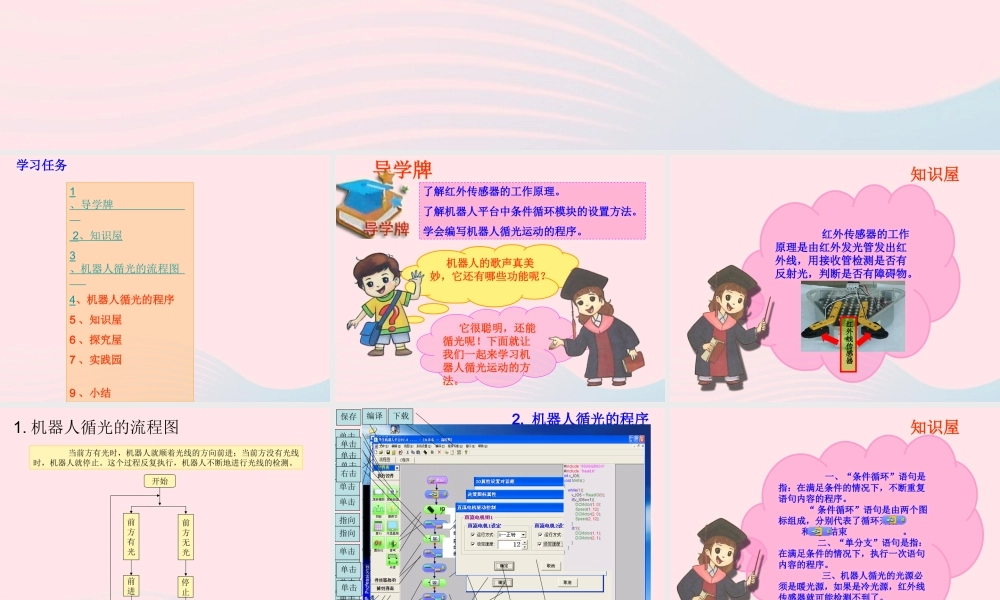
了解机器人平台中条件循环模块的设置方法
学会编写机器人循光运动的程序
它很聪明,还能循光呢
下面就让 我们一起来学习机器人循光运动的方法
机器人的歌声真美妙,它还有哪些功能呢
知识屋 红外传感器的工作原理是由红外发光管发出红外线,用接收管检测是否有反射光,判断是否有障碍物
红外线传感器1
机器人循光的流程图 当前方有光时,机器人就顺着光线的方向前进;当前方没有光线时,机器人就停止
这个过程反复执行,机器人不断地进行光线的检测
开始前方有光前方无光前进停止2
机器人循光的程序单击指向指向单击单击单击单击单击单击单击单击单击右击单击单击单击单击单击单击右击单击设置单击单击单击单击右击单击设置单击继续保存编译下载知识屋 一、“条件循环”语句是指:在满足条件的情况下,不断重复语句内容的程序
“ 条件循环”语句是由两个图标组成,分别代表了循环开始 和循环结束
二、“单分支”语句是指:在满足条件的情况下,执行一次语句内容的程序
三、机器人循光的光源必须是暖光源,如果是冷光源,红外线传感器就可能检测不到了
探究屋( 1 )为什么要读 IO6 的值呢
( 2 )如果希望没有光线的时候,机器人后退,这个程序你会编写吗
只有读取 IO6 的值,机器人才能判断是否前进
前方没有光线时,即 IO6 的值为 0时,电机设置成反转就成了
实践园 为机器人编写一个跟光行走的程序,并在机器人小组中演示
小结: 机器人循光单击指向指向单击单击单击单击单击单击单击单击单击右击单击单击单击单击单击单击右击单击设置单击单击单击单击右击单击设置单击继续保存编译下载成果篮说一说,学习了本课你有哪些收