4常规型微程序控制器组成实验一、实验目的1
掌握时序发生器的组成原理
掌握微程序控制器的组成原理
二、实验电路1
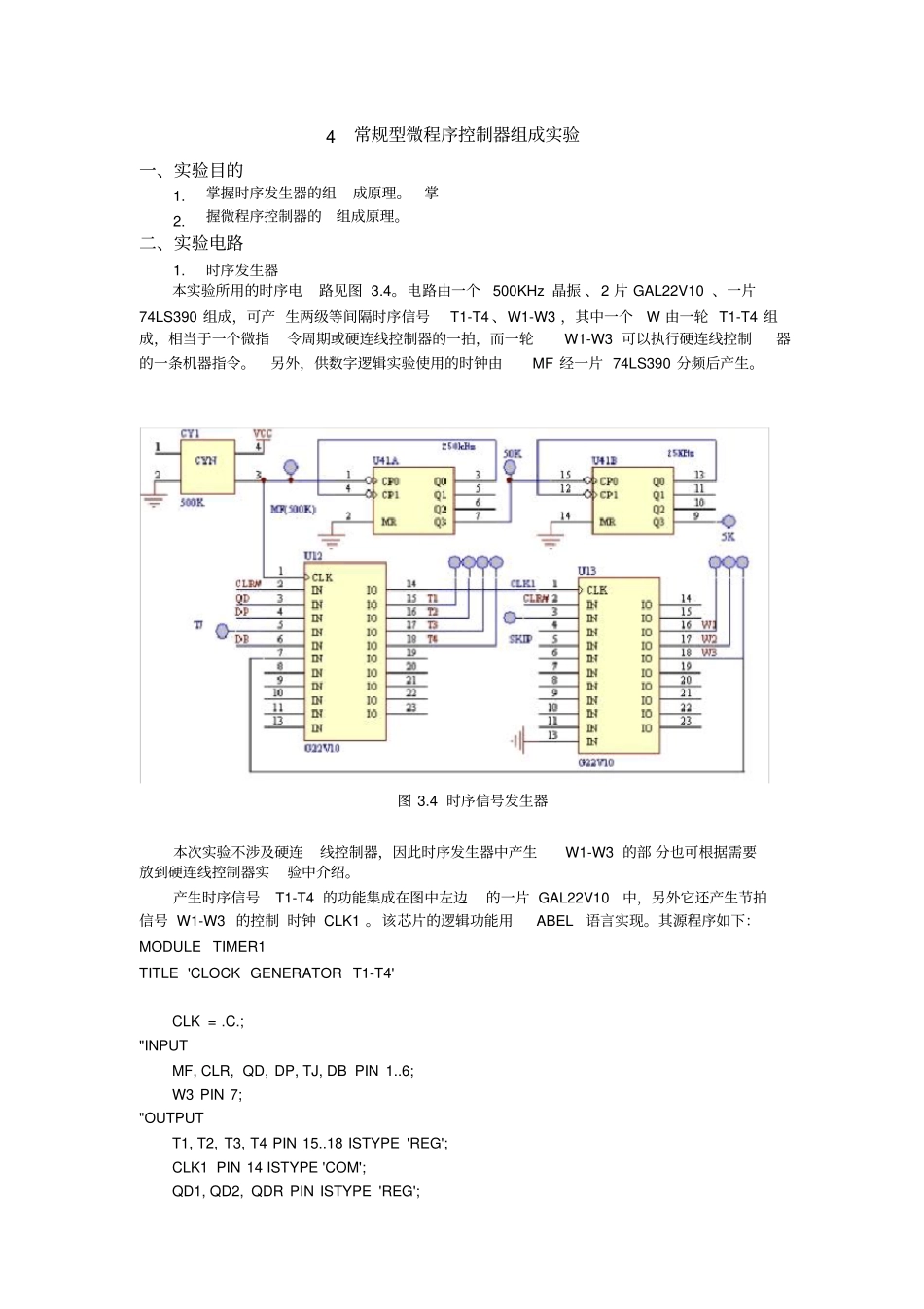
时序发生器本实验所用的时序电路见图3
电路由一个500KHz晶振、2片GAL22V10、一片74LS390组成,可产生两级等间隔时序信号T1-T4、W1-W3,其中一个W由一轮T1-T4组成,相当于一个微指令周期或硬连线控制器的一拍,而一轮W1-W3可以执行硬连线控制器的一条机器指令
另外,供数字逻辑实验使用的时钟由MF经一片74LS390分频后产生
4时序信号发生器本次实验不涉及硬连线控制器,因此时序发生器中产生W1-W3的部分也可根据需要放到硬连线控制器实验中介绍
产生时序信号T1-T4的功能集成在图中左边的一片GAL22V10中,另外它还产生节拍信号W1-W3的控制时钟CLK1
该芯片的逻辑功能用ABEL语言实现
其源程序如下:MODULETIMER1TITLE'CLOCKGENERATORT1-T4'CLK=
;"INPUTMF,CLR,QD,DP,TJ,DBPIN1
6;W3PIN7;"OUTPUTT1,T2,T3,T4PIN15
18ISTYPE'REG';CLK1PIN14ISTYPE'COM';QD1,QD2,QDRPINISTYPE'REG';ACTPINISTYPE'COM';S=[T1,T2,T3,T4,QD1,QD2,QDR];EQUATIONSQD1:=QD;QD2:=QD1;ACT=QD1&
QD2;QDR:=CLR&QD#CLR&QDR;T1:=CLR&T4&ACT#CLR&T4&
(DP#TJ#DB&W3)&QDR;T2:=CLR&T1;T3:=CLR&T2;T4:=
CLR#T3#T4&
ACT&(DP#TJ