第一讲:桁架式机器人概论•第一节:桁架式机器人组成桁架式机器人由多维直线导轨搭建而成
直线导轨由精制铝型材、齿型带、直线滑动导轨和伺服电机等组成
作为运动框架和载体的精制铝型材其截面形状通过有限元分析法来优化设计,生产中的精益求精确保其强度和直线度
采用轴承光杠和直线滑动导轨作为运动导轨
运动传动机构采用齿型带,齿条或滚珠丝杠
桁架式机器人的空间运动是用三个相互垂直的直线运动来实现的、
由于直线运动易于实现全闭环的位置控制,所以,桁架式机器人有可能达到很高的位置精度(pm级)
但是,这种桁架式机器人的运动空间相对机器人的结构尺寸来讲,是比较小的
因此,为了实现一定的运动空间,桁架式机器人的结构尺寸要比其他类型的机器人的结构尺寸大得多
桁架式机器人的工作空间为一空间长方体
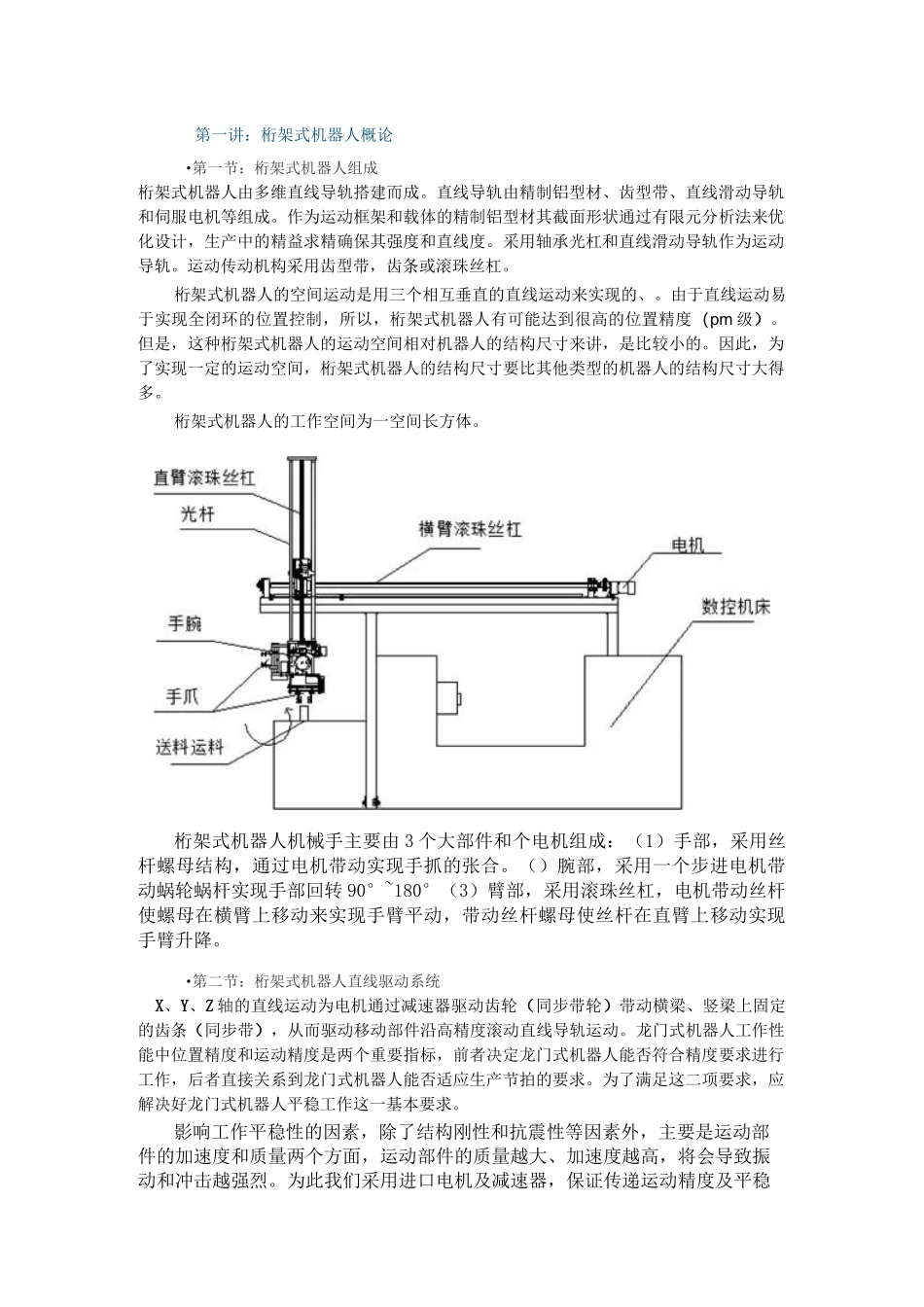
桁架式机器人机械手主要由3个大部件和个电机组成:(1)手部,采用丝杆螺母结构,通过电机带动实现手抓的张合
()腕部,采用一个步进电机带动蜗轮蜗杆实现手部回转90°~180°(3)臂部,采用滚珠丝杠,电机带动丝杆使螺母在横臂上移动来实现手臂平动,带动丝杆螺母使丝杆在直臂上移动实现手臂升降
•第二节:桁架式机器人直线驱动系统X、Y、Z轴的直线运动为电机通过减速器驱动齿轮(同步带轮)带动横梁、竖梁上固定的齿条(同步带),从而驱动移动部件沿高精度滚动直线导轨运动
龙门式机器人工作性能中位置精度和运动精度是两个重要指标,前者决定龙门式机器人能否符合精度要求进行工作,后者直接关系到龙门式机器人能否适应生产节拍的要求
为了满足这二项要求,应解决好龙门式机器人平稳工作这一基本要求
影响工作平稳性的因素,除了结构刚性和抗震性等因素外,主要是运动部件的加速度和质量两个方面,运动部件的质量越大、加速度越高,将会导致振动和冲击越强烈
为此我们采用进口电机及减速器,保证传递运动精度及平稳性,并通过优化设计减轻部件重量,采用合理的加速