※※※※※※※※※※2015级学生※※课程设计材料※※※※※※※※※※※※课程设计报告书课题名称智能小车蓝牙操控和循迹的实现姓名学号学院专业指导教师2019年2月15日1设计目的通过设计进一步掌握51单片机的应用,特别是在嵌入式系统中的应用
进一步学习51单片机在系统中的控制功能,能够合理设计单片机的外围电路,并使之与单片机构成整个系统
2功能要求智能小车作为现代的新发明,是以后的发展方向,他可以按照预先设定的模式在一个环境里自动运作,不需要人为的管理,可应用于科学勘探等等用途;并且能实现显示时间、速度、里程,具有自动寻迹、寻光、避障等功能,可程控行驶速度、准确定位停车,远程传输图像、按键控制加速,减速,刹停,左转和右转、实时显示运行状态等功能
3总体设计方案在现有玩具电动车的基础上,加了四个按键,实现对电动车的运行轨迹的启动,并将按键的状态传送至单片机进行处理,然后由单片机根据所检测的各种按键状态实现对电动车的智能控制
这种方案能实现对电动车的运动状态进行实时控制,控制灵活、可靠,精度高,可满足对系统的各项要求
本设计采用AT89C51单片机
以AT89C51为控制核心,利用按键的动作,控制电动小汽车的状态
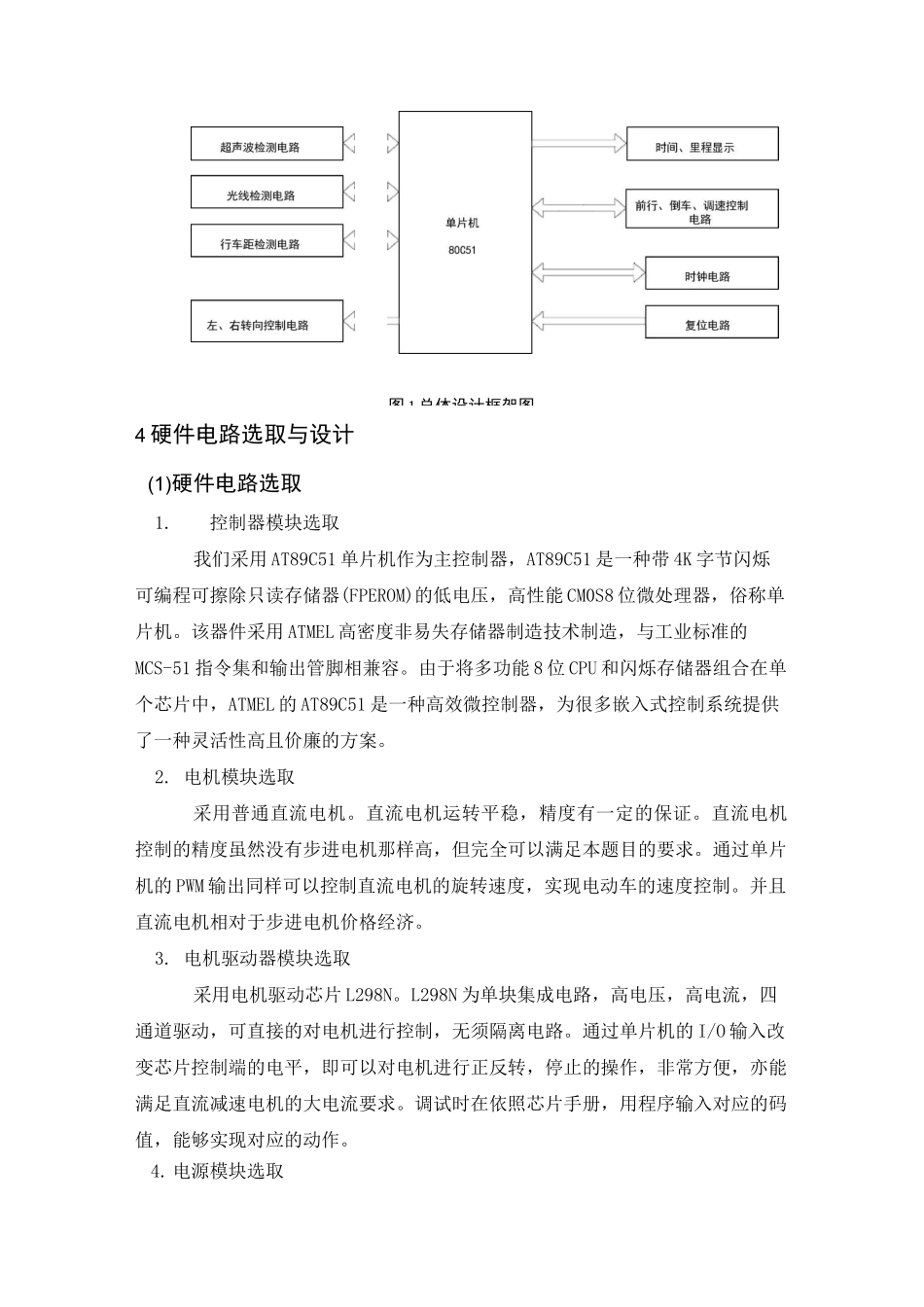
加装光电、红外线、超声波传感器,实现对电动车的速度、位置、运行状况的实时测量,并将测量数据传送至单片机进行处理,然后由单片机根据所检测的各种数据实现对电动小车的智能控制,如图1所示
简易智能电动车采用AT89C51单片机进行智能控制
开始由手动启动小车,并复位初始化,当到达规定的起始黑线,由小车底部的红外光电传感器检测到第一条黑线后,通过单片机控制小车开始记数、显示、调速[2]
在白纸所做轨迹道路中,小车通过超声波传感器正前方检测和光电传感器左右侧检测,由单片机控制实现系统的自动避障功能
在电动车进驶过程中,采用双极式H型PWM脉宽调制技术,以控制小车调速;并采用动态