用恒模算法进行盲自适应均衡的MATLAB仿真一:仿真内容:1:了解盲均衡算法和CMA算法的原理;2:用CMA算法来仿真4QAM信号;二:算法原理:1:盲均衡算法:普通的均衡器需要训练和跟踪两个阶段,在训练阶段,需要已知信号的一些特性参数来训练均衡滤波器,或者直接周期地发送训练序列
由于训练序列并不含用户的数据,而占用了信道资源,自然会降低信道的利用率
另外,在跟踪阶段,不发送训练序列,如果信道特性是快速变化的,均衡器的性能将迅速恶化
盲均衡能够不借助训练序列(即我们通常所说的“盲”,而仅仅利用所接收到的信号序列即可对信道进行均衡
换言之,其本身完全不用训练序列,就可以自启动收敛并防止死锁情况,且能使滤波器的输出与要恢复的输入信号相等
盲均衡从根本上避免了训练序列的使用,收敛范围大,应用范围广,克服了传统自适应均衡的缺点,从而降低了对信道和信号的要求
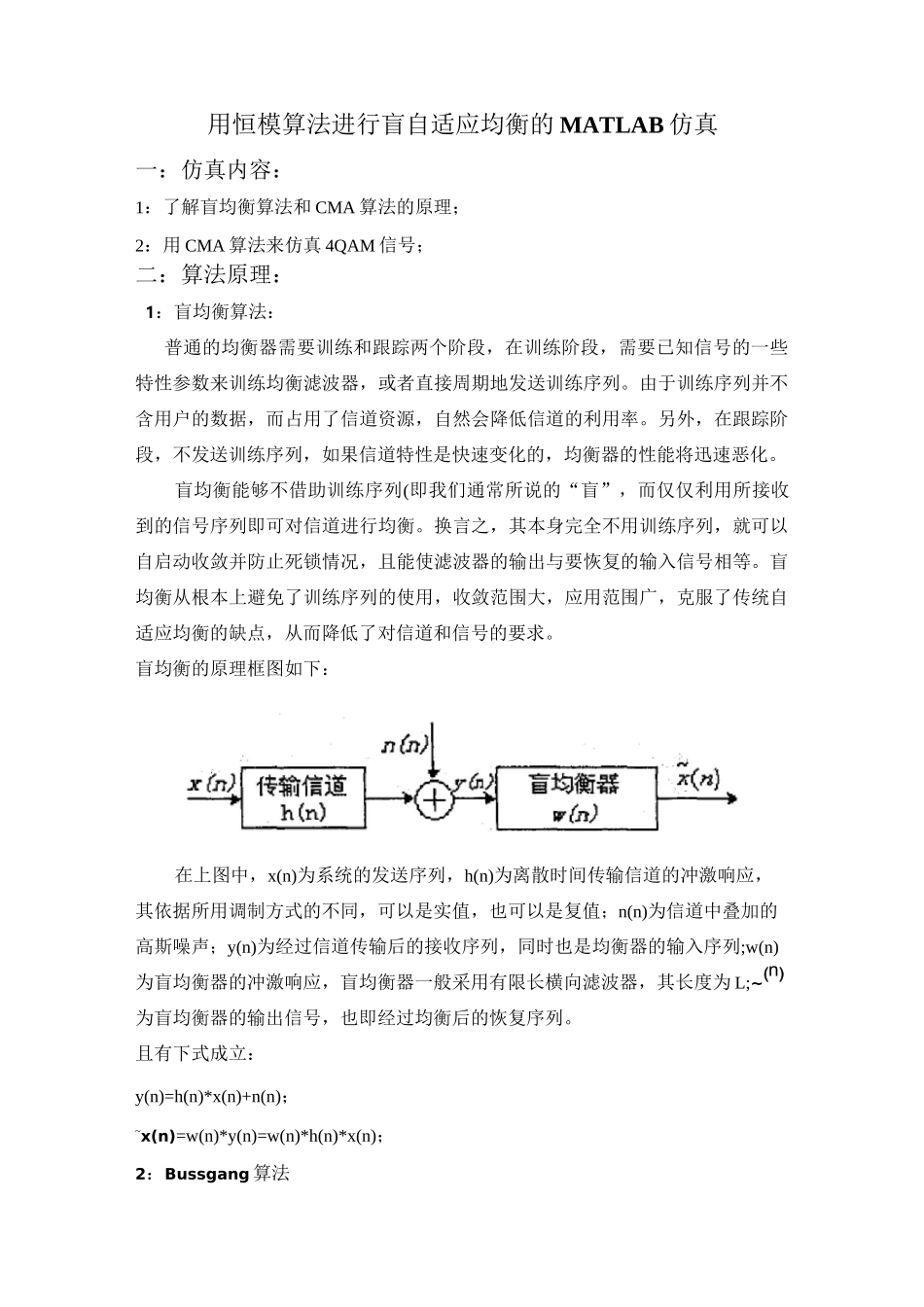
盲均衡的原理框图如下:在上图中,x(n)为系统的发送序列,h(n)为离散时间传输信道的冲激响应,其依据所用调制方式的不同,可以是实值,也可以是复值;n(n)为信道中叠加的高斯噪声;y(n)为经过信道传输后的接收序列,同时也是均衡器的输入序列;w(n)为盲均衡器的冲激响应,盲均衡器一般采用有限长横向滤波器,其长度为L;~(n)为盲均衡器的输出信号,也即经过均衡后的恢复序列
且有下式成立:y(n)=h(n)*x(n)+n(n);~x(n)=w(n)*y(n)=w(n)*h(n)*x(n);2:Bussgang算法Bussgang类盲均衡算法作为盲均衡算法的一个分支,是在原来需要训练序列的传统自适应均衡算法基础上发展起来的
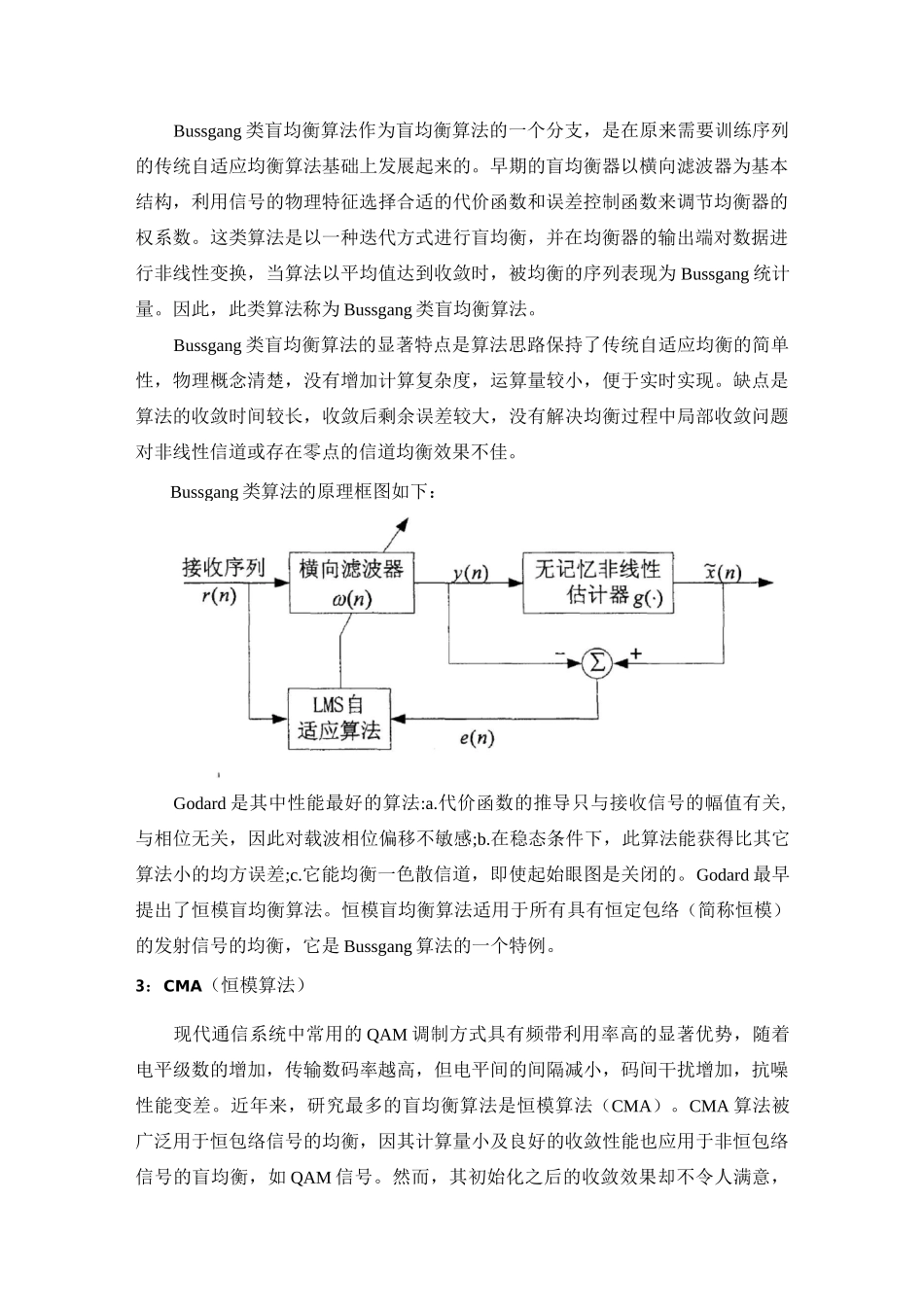
早期的盲均衡器以横向滤波器为基本结构,利用信号的物理特征选择合适的代价函数和误差控制函数来调节均衡器的权系数
这类算法是以一种迭代方式进行盲均衡,并在均衡器的输出端对数据进行非线性变换,当算法以平均值达到收敛时,被