Kinect传感器及其应用宋攀婷3113037013Kinect结构Kinect是微软公司研制的一款体感外设,实际上是一种3D体感摄影机
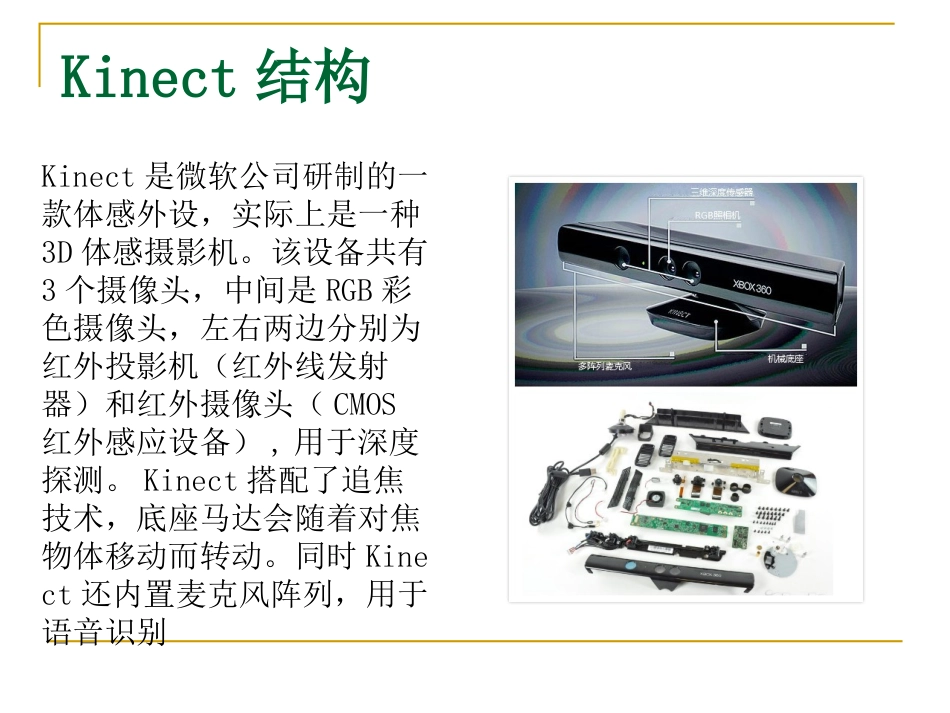
该设备共有3个摄像头,中间是RGB彩色摄像头,左右两边分别为红外投影机(红外线发射器)和红外摄像头(CMOS红外感应设备),用于深度探测
Kinect搭配了追焦技术,底座马达会随着对焦物体移动而转动
同时Kinect还内置麦克风阵列,用于语音识别Kinect深度图像产生原理Kinect采用光编码技术,可以直接获取物体和摄像头之间的距离
基本思想是通过连续光(近红外线)对测量空间进行编码,再进过CMOS感应器得到编码的光线,将数据传递给晶片(ps1080系统级芯片SoC)进行运算解码,产生一张具有深度的图像
核心一:结构光技术,激光散斑
核心二:光源标定,参考平面,相关运算
Kinect三角投影法的基本原理001kZZZdfbKinect用于检测和识别手势①肤色分割找到手的位置L*a*b颜色空间,b(23)1)RGB图像→L*a*b颜色空间2)b=2,b=3时转换图像的两个切片3)切片图像转换成二值图像4)两幅二值图像进行”和“操作A:手分割A1:RGB图像A2:深度图像A3:b=2A4:b=3A5:和操作后的肤色图像A6:手分割二值图像②通过K均值聚类分离手如果两只手距离传感器有相同距离,二值图像仅会显示一支手,K=2代表人只有两只手③找到手掌中心手掌比较宽大,可以近似为一个圆,两种选择:最小外接圆和最大内切圆(最佳),最大内切圆的中心近似为手掌中心
B:手指识别①找到凸包:用Graham扫描算法②检测指尖和手指方向方向矢量和等腰三角形中顶角的二等分线平行设置最大阈值AGraham扫描算法寻找凸包首先找到点集P中y坐标最小的点,如果y坐标相等,找出x坐标最小的点p0
以这个点p0为基准,将其他点与之相连,夹角由小到大进行排序