第二章平面机构的运动简图及其自由度返回返回运动副及其分类平面机构运动简图平面机构的自由度主要内容及目的是:研究机构的组成及机构运动简图的画法;了解机构具有确定运动的条件、进行机构自由度计算;研究机构的组成原理及结构分类
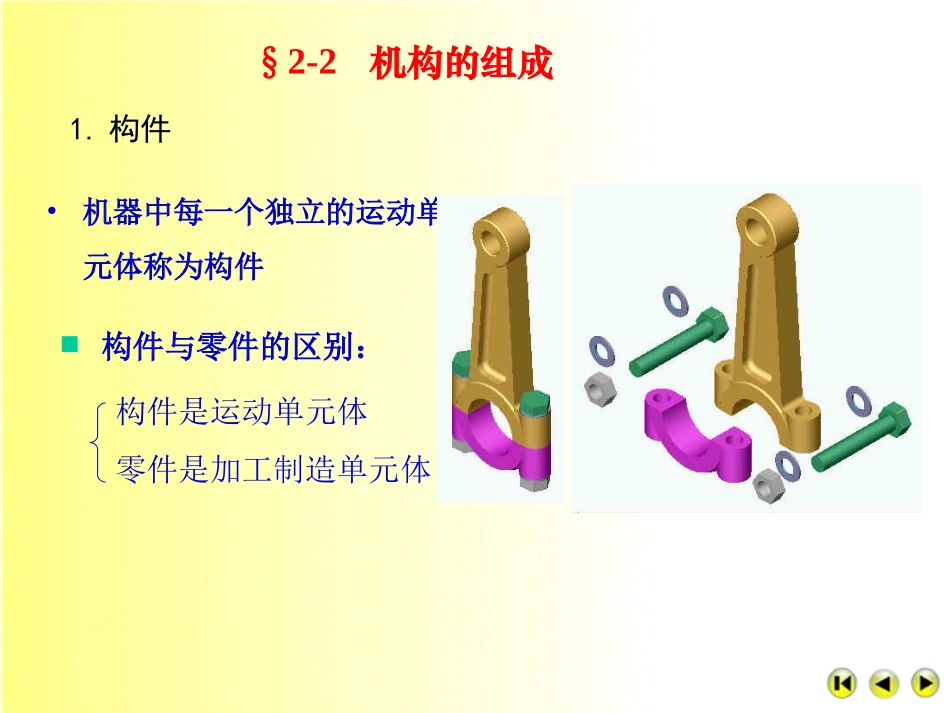
§2-2机构的组成1
构件•机器中每一个独立的运动单元体称为构件构件与零件的区别:构件是运动单元体零件是加工制造单元体构件是由一个或若干个零件组成刚性系统
零件——制造单元体
齿轮轴键构件固定构件——机架活动构件主动件从动件主动件(或原动件
)作用有驱动力(矩)的活动构件称为输入运动或动力的主动件称为输入件
构件——运动单元体
内燃机输出运动或动力的从动件称为输出件
一个自由构件空间运动:6个自由度平面运动:3个自由度机构的组成(2/16)是两构件参与接触而构成运动副的表面
是两构件直接接触而构成的可动连接;2
运动副运动副运动副元素两构件上组成运动副时相对运动受到限制,这种对独立运动的限制称约束自由度减少数目等于约束数目
引入约束数目与运动副种类有关
根据引入约束数目分Ⅰ、Ⅱ……Ⅴ级副
约束例2-1轴与轴承、滑块与导轨、两轮齿啮合
机构的组成(3/16)运动副的分类转动副移动副高副空间运动副:圆柱副,螺旋副和球面副等平面运动副低副:面接触的运动副高副:点、线接触的运动副转动副移动副机构的组成(4/16)212121移动副转动副121212运动副——高副转动副自由度数目约束数目1yx转动副122约束特点:x,y方向移动机构的组成(5/16)一个独立相对运动
引入2个约束,保留1个自由度移动副自由度数目约束数目12移动副yx12约束特点:Y方向移动,z方向转动机构的组成(6/16)一个独立相对运动
引入2个约束,保留1个自由度高副高副ntnt121221自由度数目约束数目约束特点:n方向移动机构的组成(7/14)两个独立相对运动
引入1个约束,保留2个自由度