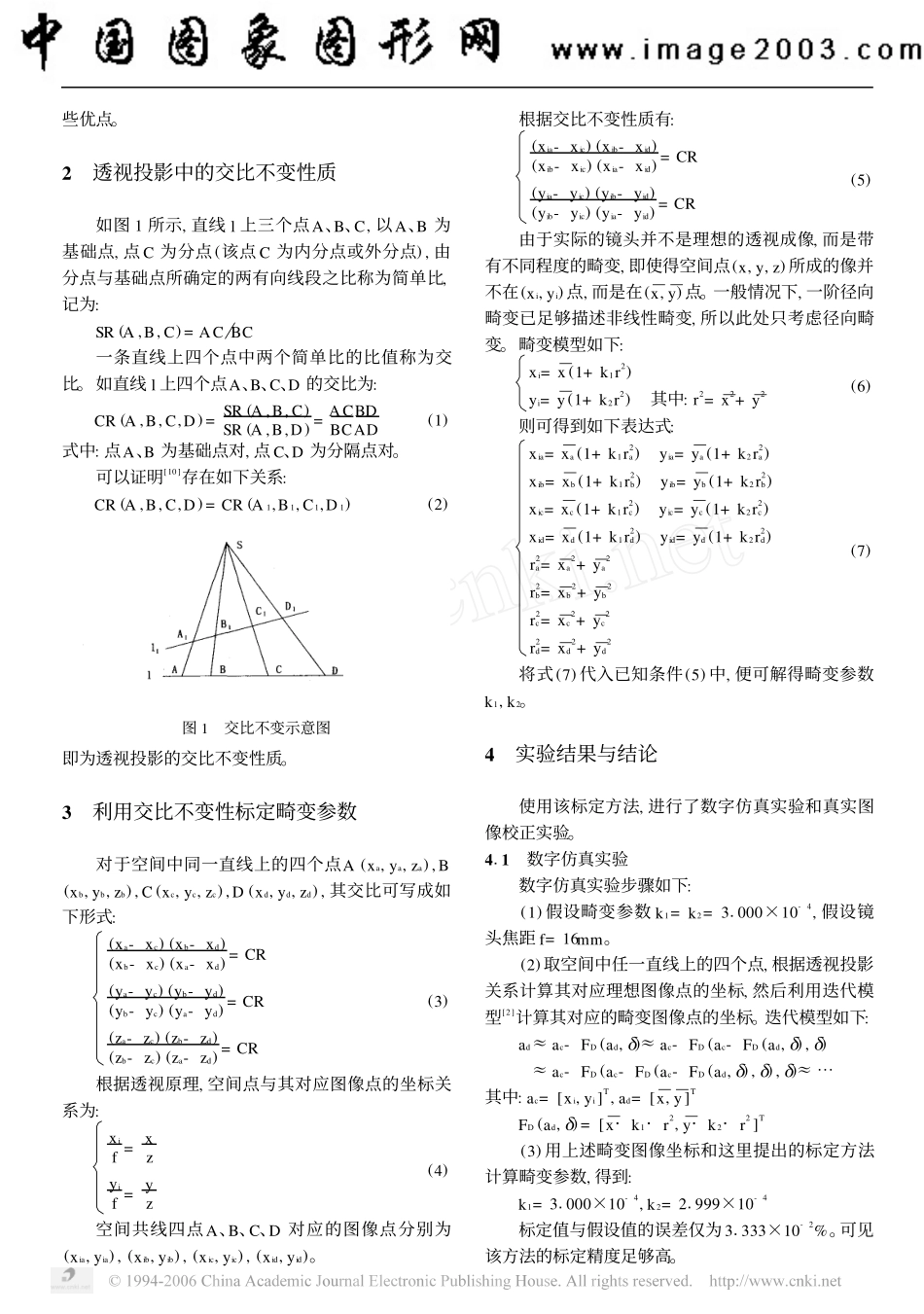
基于交比不变性的镜头畸变参数标定方法Ξ贺俊吉张广军杨宪铭(北京航空航天大学自动化学院北京100083)摘要在分析目前的畸变参数标定方法优缺点的基础上,提出了一种能克服现有技术缺点的简单快速的镜头畸变参数标定方法。该方法利用了透视投影中的交比不变性质,在畸变模型为一阶径向畸变的情况下,只需要空间共线的4个点的图像坐标和其交比,建立一元二次方程即可标定畸变参数。该方法的特点是算法简单,易于实施,需要已知条件少。对此标定方法进行了数字仿真实验和真实图像校正实验,证明该方法标定精度高,简单易行。关键词摄像机镜头畸变校正畸变参数标定交比不变ApproachforCalibrationofLensDistortionBasedonCrossRatioInvariabilityHeJunjiZhangGuangjunYangXianming(BeijingUniversityofAeronauticsandAstronautics,Beijing100083,China)AbstractAnewapproachforlensdistortioncalibrationispresented,whichutilizesthecrossratioinvariabilityofperspectiveprojection.Itovercomesthedisadvantagesofexistingdistortioncalibrationapproaches.Assumedonlywithoneorderradialdistortion,imagecoordinatesofonly4specialcollinearpointsareneededaswellasthecrossratioofthem.Anmonadictwoorderequationisbuiltwiththeseinfo,whichwillgivethesolutionofdis2tortioncoefficient.Digitalimitationexperimentandrealdistortedimagecorrectionprovedthisapproachissim2ple,accurateandtimesaving.KeywordsCameralensDistortioncorrectionDistortioncoefficientsCalibrationCrossratioinvariability1引言在工业、医疗等领域的视觉检测技术、内窥技术中,所应用的成像镜头往往带有不同程度的畸变特性,使所获得的图像较之真正的透视投影图像有畸变。为保证后续的图像处理和分析的准确性,必须检测畸变的大小并进行相应的校正。如何快速有效的检测出镜头的畸变参数是上述技术的一个重要方面,是研究的内容之一。目前检测校正镜头畸变的方法主要分为两大类。一类是机器视觉检测技术中常用的方法[1~6],根据其特点称之为非线性优化法。该方法的特点是:畸变参数的标定是与其他参数的标定融合在一起的;用于工业测量的镜头一般畸变轻微,所以畸变模型较简单,可以只取一阶畸变;畸变参数的求解需要的先决条件多,比如需要摄像机的内外部参数;畸变参数的求解过程是非线性优化过程,相对于线性方程的求解计算量大。另一类是针对内窥镜镜头的大畸变的标定和校正,多采用畸变像素与校正像素多项式映射法[7~9]。该方法的特点是:只针对径向畸变建立模型,能校正较严重的畸变(广角镜头的畸变),畸变模型的参数多(约有10个),需要提取的特征点多,计算复杂,计算量大。现有畸变参数标定方法存在如下的不足:要么畸变模型复杂,参数较多,计算量大;要么虽然畸变参数少,但依赖于系统其他参数的标定,标定过程较复杂。这些不足之处制约了畸变参数的标定速度和精度。需要寻找一种操作简单,计算简单,要求先决条件少,快速又准确的标定方法来标定镜头的畸变参数。这里提出的利用交比不变性质标定畸变参数的方法就具有这第25卷第5期仪器仪表学报2004年10月Ξ本文于2002年11月收到,系国防基础预研究资助项目。些优点。2透视投影中的交比不变性质如图1所示,直线l上三个点A、B、C,以A、B为基础点,点C为分点(该点C为内分点或外分点),由分点与基础点所确定的两有向线段之比称为简单比,记为:SR(A,B,C)=AC�BC一条直线上四个点中两个简单比的比值称为交比。如直线l上四个点A、B、C、D的交比为:CR(A,B,C,D)=SR(A,B,C)SR(A,B,D)=ACBCBDAD(1)式中:点A、B为基础点对,点C、D为分隔点对。可以证明[10]存在如下关系:CR(A,B,C,D)=CR(A1,B1,C1,D1)(2)图1交比不变示意图即为透视投影的交比不变性质。3利用交比不变性标定畸变参数对于空间中同一直线上的四个点A(xa,ya,za),B(xb,yb,zb),C(xc,yc,zc),D(xd,yd,zd),其交比可写成如下形式:(xa-xc)(xb-xd)(xb-xc)(xa-xd)=CR(ya-yc)(yb-yd)(yb-yc)(ya-yd)=CR(za-zc)(zb-zd)(zb-zc)(za-zd)=CR(3)根据透视原理,空间点与其对应图像点的坐标关系为:xif=xzyif=yz(4)空间共线四点A、B、C、D对应的图像点分别为(xi...