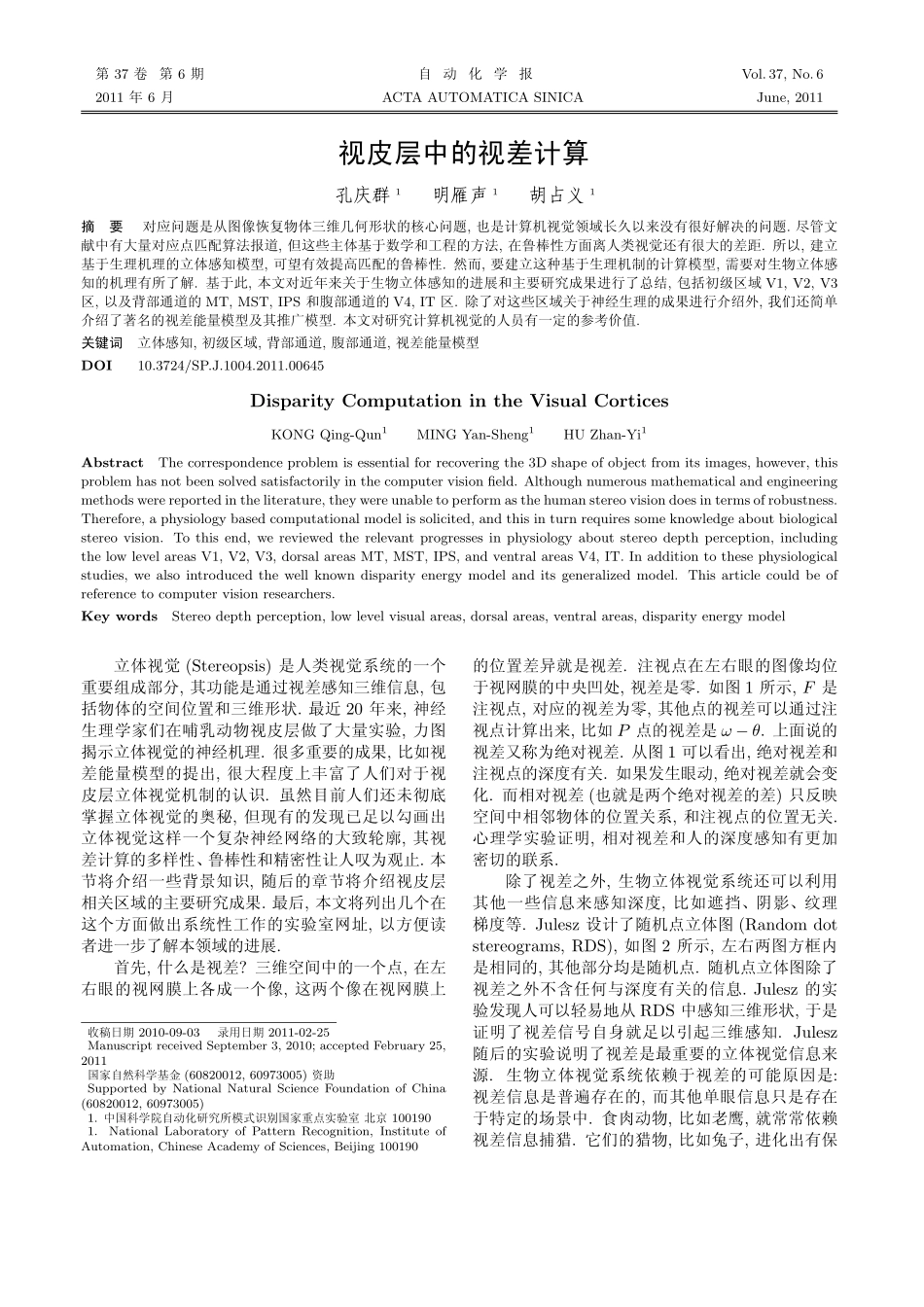
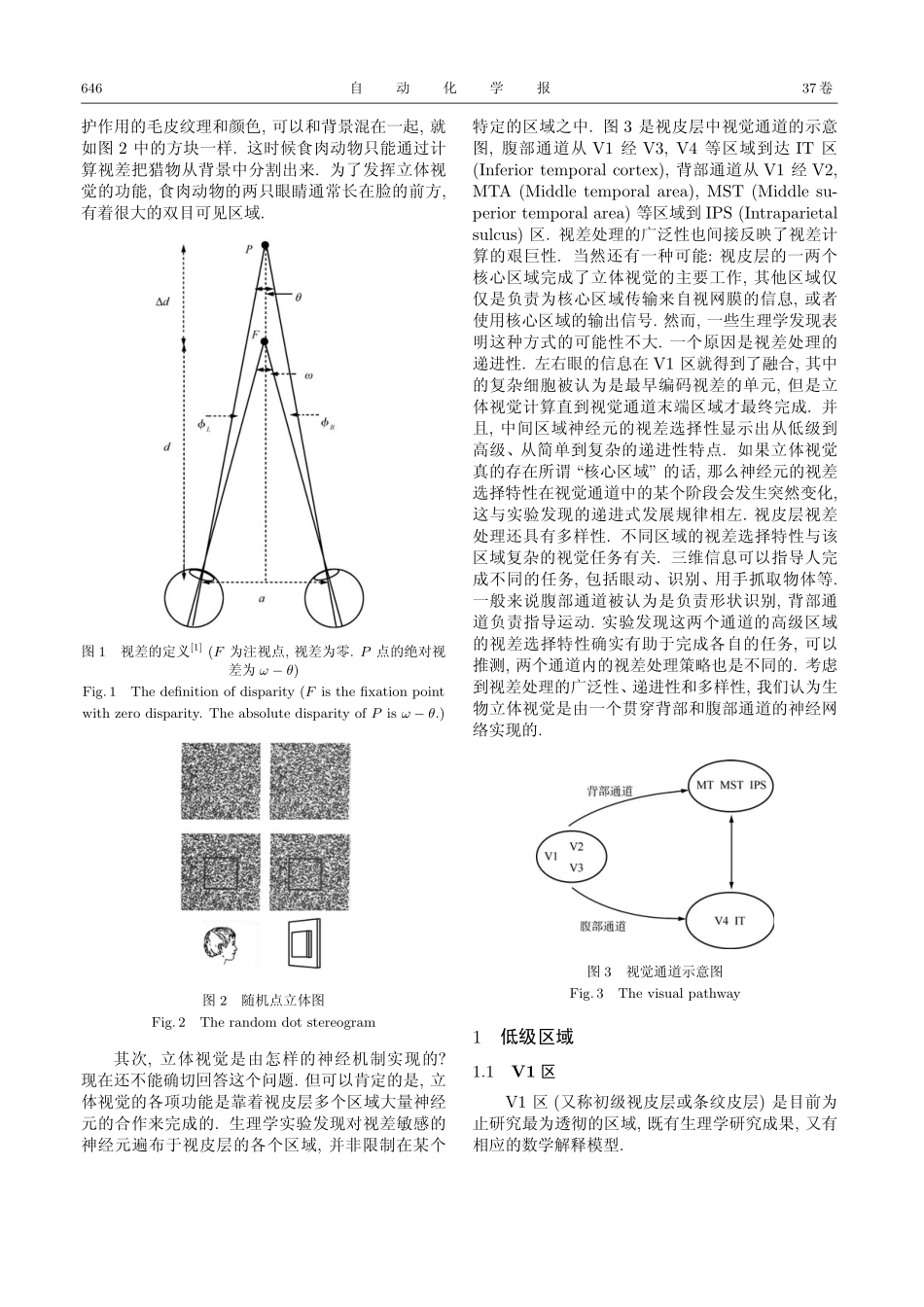
第37卷第6期自动化学报Vol.37,No.62011年6月ACTAAUTOMATICASINICAJune,2011视皮层中的视差计算孔庆群1明雁声1胡占义1摘要对应问题是从图像恢复物体三维几何形状的核心问题,也是计算机视觉领域长久以来没有很好解决的问题.尽管文献中有大量对应点匹配算法报道,但这些主体基于数学和工程的方法,在鲁棒性方面离人类视觉还有很大的差距.所以,建立基于生理机理的立体感知模型,可望有效提高匹配的鲁棒性.然而,要建立这种基于生理机制的计算模型,需要对生物立体感知的机理有所了解.基于此,本文对近年来关于生物立体感知的进展和主要研究成果进行了总结,包括初级区域V1,V2,V3区,以及背部通道的MT,MST,IPS和腹部通道的V4,IT区.除了对这些区域关于神经生理的成果进行介绍外,我们还简单介绍了著名的视差能量模型及其推广模型.本文对研究计算机视觉的人员有一定的参考价值.关键词立体感知,初级区域,背部通道,腹部通道,视差能量模型DOI10.3724/SP.J.1004.2011.00645DisparityComputationintheVisualCorticesKONGQing-Qun1MINGYan-Sheng1HUZhan-Yi1AbstractThecorrespondenceproblemisessentialforrecoveringthe3Dshapeofobjectfromitsimages,however,thisproblemhasnotbeensolvedsatisfactorilyinthecomputervisionfield.Althoughnumerousmathematicalandengineeringmethodswerereportedintheliterature,theywereunabletoperformasthehumanstereovisiondoesintermsofrobustness.Therefore,aphysiologybasedcomputationalmodelissolicited,andthisinturnrequiressomeknowledgeaboutbiologicalstereovision.Tothisend,wereviewedtherelevantprogressesinphysiologyaboutstereodepthperception,includingthelowlevelareasV1,V2,V3,dorsalareasMT,MST,IPS,andventralareasV4,IT.Inadditiontothesephysiologicalstudies,wealsointroducedthewellknowndisparityenergymodelanditsgeneralizedmodel.Thisarticlecouldbeofreferencetocomputervisionresearchers.KeywordsStereodepthperception,lowlevelvisualareas,dorsalareas,ventralareas,disparityenergymodel立体视觉(Stereopsis)是人类视觉系统的一个重要组成部分,其功能是通过视差感知三维信息,包括物体的空间位置和三维形状.最近20年来,神经生理学家们在哺乳动物视皮层做了大量实验,力图揭示立体视觉的神经机理.很多重要的成果,比如视差能量模型的提出,很大程度上丰富了人们对于视皮层立体视觉机制的认识.虽然目前人们还未彻底掌握立体视觉的奥秘,但现有的发现已足以勾画出立体视觉这样一个复杂神经网络的大致轮廓,其视差计算的多样性、鲁棒性和精密性让人叹为观止.本节将介绍一些背景知识,随后的章节将介绍视皮层相关区域的主要研究成果.最后,本文将列出几个在这个方面做出系统性工作的实验室网址,以方便读者进一步了解本领域的进展.首先,什么是视差?三维空间中的一个点,在左右眼的视网膜上各成一个像,这两个像在视网膜上收稿日期2010-09-03录用日期2011-02-25ManuscriptreceivedSeptember3,2010;acceptedFebruary25,2011国家自然科学基金(60820012,60973005)资助SupportedbyNationalNaturalScienceFoundationofChina(60820012,60973005)1.中国科学院自动化研究所模式识别国家重点实验室北京1001901.NationalLaboratoryofPatternRecognition,InstituteofAutomation,ChineseAcademyofSciences,Beijing100190的位置差异就是视差.注视点在左右眼的图像均位于视网膜的中央凹处,视差是零.如图1所示,F是注视点,对应的视差为零,其他点的视差可以通过注视点计算出来,比如P点的视差是ω−θ.上面说的视差又称为绝对视差.从图1可以看出,绝对视差和注视点的深度有关.如果发生眼动,绝对视差就会变化.而相对视差(也就是两个绝对视差的差)只反映空间中相邻物体的位置关系,和注视点的位置无关.心理学实验证明,相对视差和人的深度感知有更加密切的联系.除了视差之外,生物立体视觉系统还可以利用其他一些信息来感知深度,比如遮挡、阴影、纹理梯度等.Julesz设计了随机点立体图(Randomdotstereograms,RDS),如图2所示,左右两图方框内是相同的,其他部分均是随机点.随...