实验一离散化方法研究一、实验目的1.学习并掌握数字控制器的设计方法;2.熟悉将模拟控制器D(S)离散为数字控制器的原理与方法;3.通过数模混合实验,对D(S)的多种离散化方法作比较研究,并对D(S)离散化前后闭环系统的性能进行比较,以加深对计算机控制系统的理解
二、实验设备1.THBCC-1型信号与系统
控制理论及计算机控制技术实验平台2.THBXD数据采集卡一块(含37芯通信线、16芯排线和USB电缆线各1根)3.PC机1台(含软件“THBCC-1”)三、实验内容1.按连续系统的要求,照图3-1的方案设计一个与被控对象串联的模拟控制器D(S),并用示波器观测系统的动态特性
2.利用实验平台,设计一个数-模混合仿真的计算机控制系统,并利用D(S)离散化后所编写的程序对系统进行控制
3.研究采样周期TS变化时,不同离散化的方法对闭环控制系统性能的影响
4.对上述连续系统和计算机控制系统的动态性能作比较研究
四、实验原理由于计算机的发展,计算机及其相应的信号变换装置(A/D和D/A)取代了常规的模拟控制
在对原有的连续控制系统进行改造时,最方便的办法是将原来的模拟控制器离散化,其实质是将数字控制部分(A/D、计算机和D/A)看成一个整体,它的输入与输出都是模拟量,因而可等效于一个连续的传递函数D(S)
这样,计算机控制系统可近似地视为以D(S)为控制器的连续控制系统
下面以一个具体的二阶系统来说明D(S)控制器的离散化方法
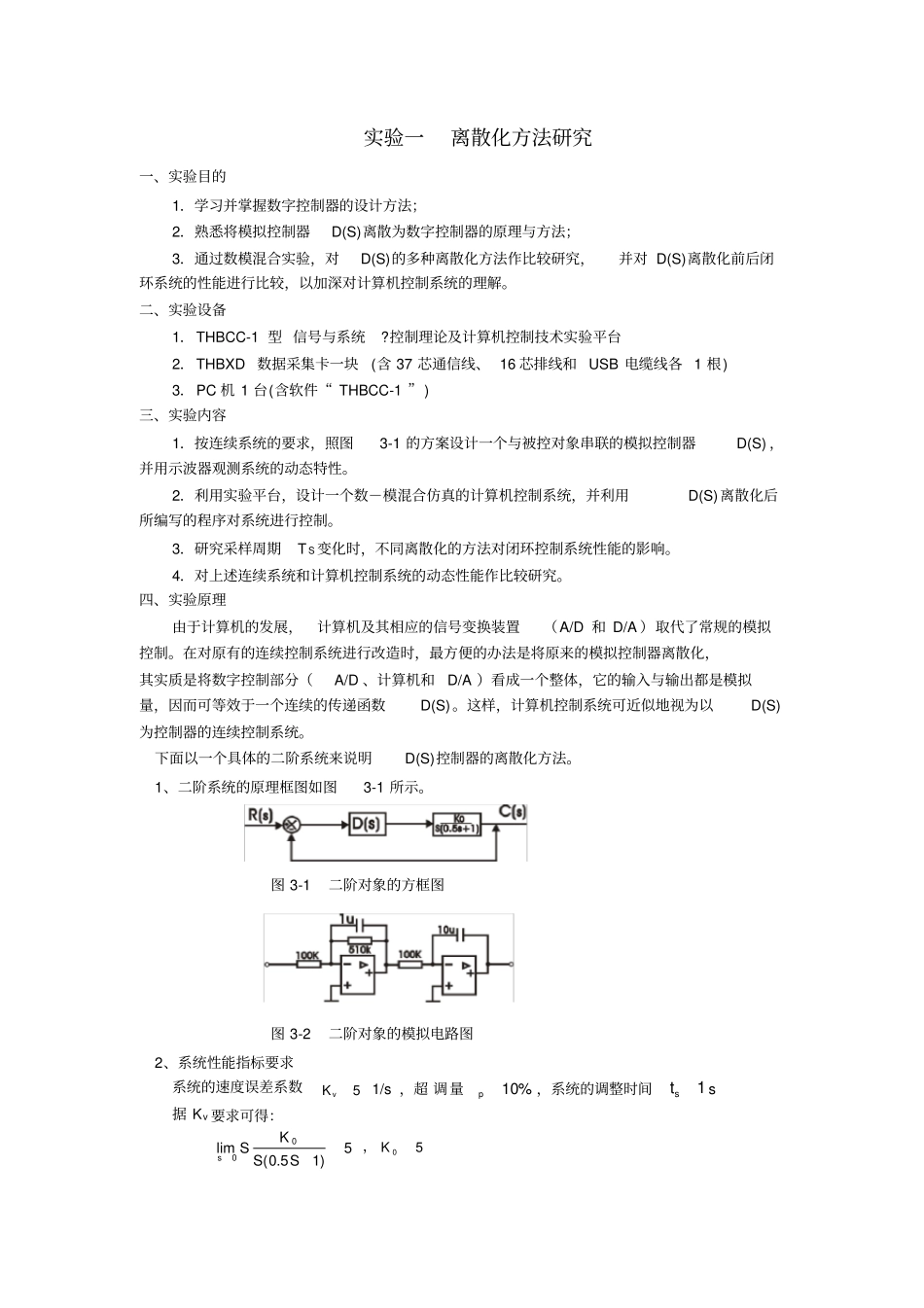
1、二阶系统的原理框图如图3-1所示
图3-1二阶对象的方框图图3-2二阶对象的模拟电路图2、系统性能指标要求系统的速度误差系数5vK1/s,超调量%10p,系统的调整时间1sts据Kv要求可得:5)15
0(lim00SSKSs,50K)2(10)15
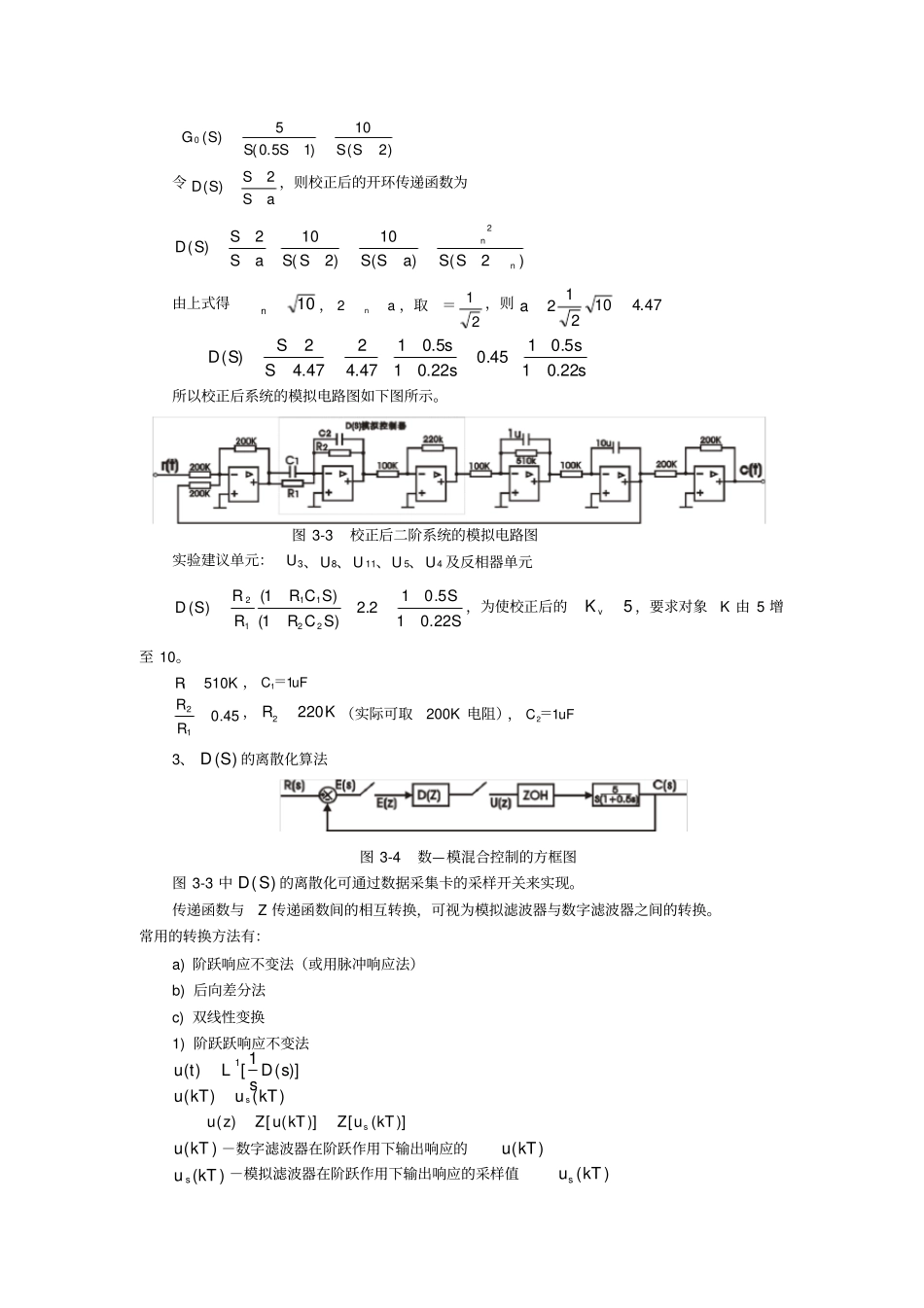
0(5)(0SSSSSG令aSSSD2)(,则校正后的开环传递函数为)2()(10)2(102)(2nn