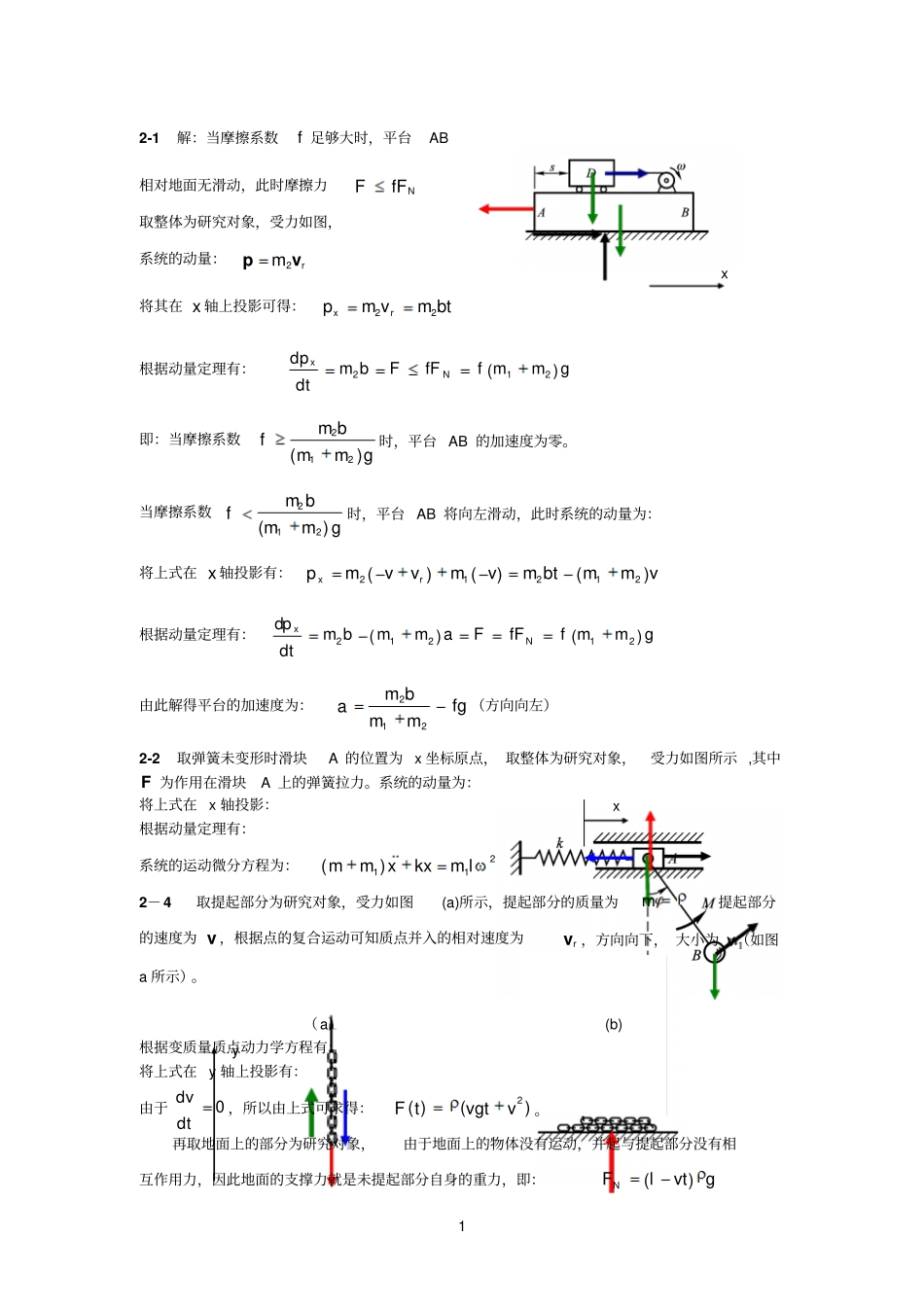
12-1解:当摩擦系数f足够大时,平台AB相对地面无滑动,此时摩擦力NfFF取整体为研究对象,受力如图,系统的动量:r2vpm将其在x轴上投影可得:btmvmpx2r2根据动量定理有:gmmffFFbmtpNx)(dd212即:当摩擦系数gmmbmf)(212时,平台AB的加速度为零
当摩擦系数gmmbmf)(212时,平台AB将向左滑动,此时系统的动量为:将上式在x轴投影有:vmmbtmvmvvmpx)()()(2121r2根据动量定理有:gmmffFFammbmtpNx)()(dd21212由此解得平台的加速度为:fgmmbma212(方向向左)2-2取弹簧未变形时滑块A的位置为x坐标原点,取整体为研究对象,受力如图所示,其中F为作用在滑块A上的弹簧拉力
系统的动量为:将上式在x轴投影:根据动量定理有:系统的运动微分方程为:lmkxxmm)(2112-4取提起部分为研究对象,受力如图(a)所示,提起部分的质量为m,提起部分的速度为v,根据点的复合运动可知质点并入的相对速度为rv,方向向下,大小为v(如图a所示)
(a)(b)根据变质量质点动力学方程有:将上式在y轴上投影有:由于0ddtv,所以由上式可求得:)()(2vvgttF
再取地面上的部分为研究对象,由于地面上的物体没有运动,并起与提起部分没有相互作用力,因此地面的支撑力就是未提起部分自身的重力,即:gvtlFN)(xxy22-5将船视为变质量质点,取其为研究对象,受力如图
根据变质量质点动力学方程有:船的质量为:qtmm0,水的阻力为vFf将其代入上式可得:将上式在x轴投影:)(ddv)(r0vqfvtqtm
应用分离变量法可求得由初始条件确定积分常数0ln)ln(mqfqvcr,并代入上式可得:2-8图a所示水平方板可绕铅垂轴z转动,板对转轴的转动惯量为J,质量为m的质点沿半径为R的圆周运动,其相对方板的速度