第七章步进控制步进电机(stepmotor)—脉冲电机电脉冲信号一角位移或直线位移
给步进电动机输入一个电脉冲信号时,它就转过一定的角度或移动一定的距离
由于其输出的角位移或直线位移可以不是连续的,因此称为步进电动机
优点:角位移或线位移与脉冲数成正比,其转速n或线速度v与脉冲频率成正比
在负载能力范围内,这种关系不会因电压波动、负载变化、温度变化等原因而变化,其控制性能很好
步进电动机广泛用于数控机床、打印机等控制系统中
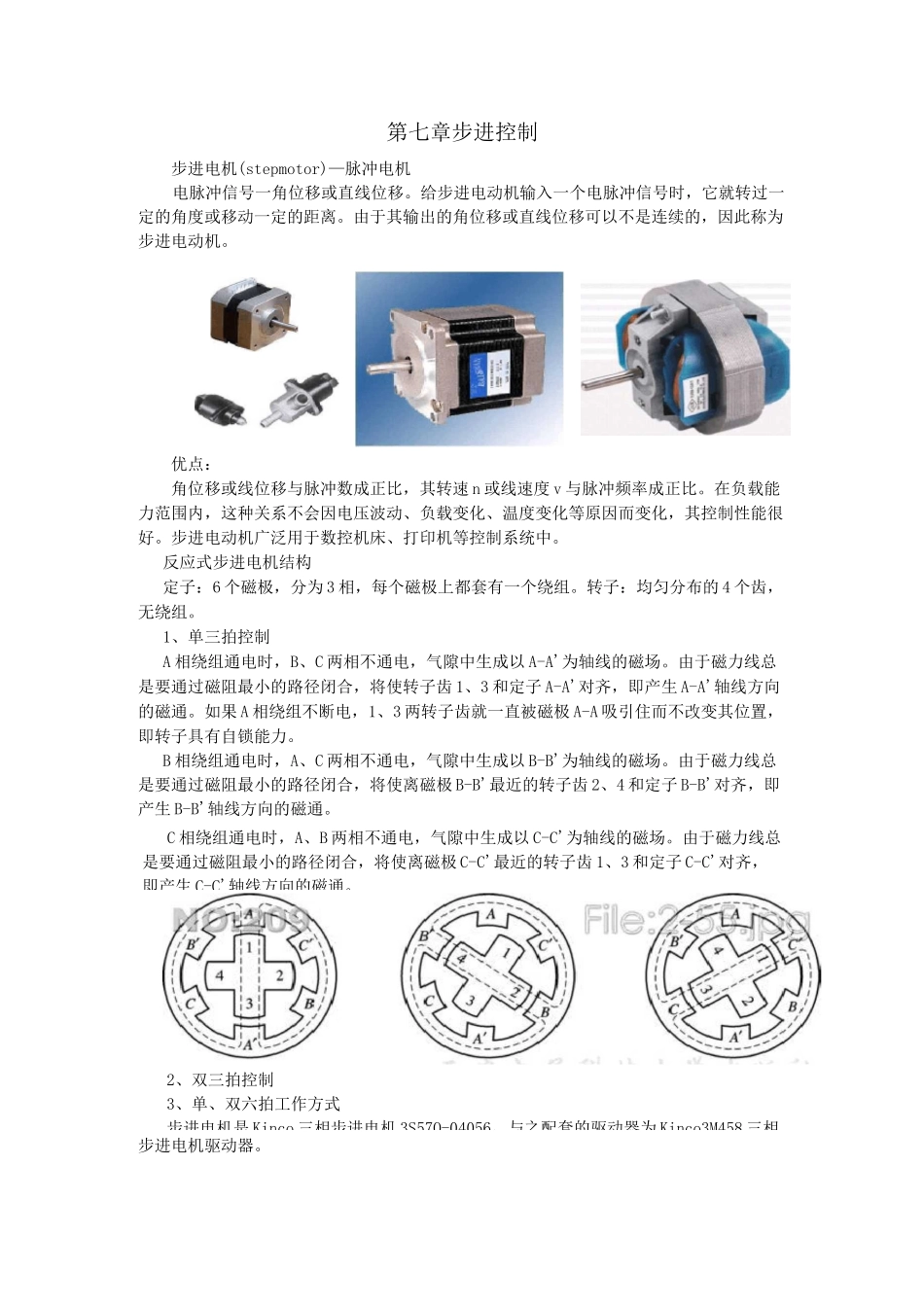
反应式步进电机结构定子:6个磁极,分为3相,每个磁极上都套有一个绕组
转子:均匀分布的4个齿,无绕组
1、单三拍控制A相绕组通电时,B、C两相不通电,气隙中生成以A-A'为轴线的磁场
由于磁力线总是要通过磁阻最小的路径闭合,将使转子齿1、3和定子A-A'对齐,即产生A-A'轴线方向的磁通
如果A相绕组不断电,1、3两转子齿就一直被磁极A-A吸引住而不改变其位置,即转子具有自锁能力
B相绕组通电时,A、C两相不通电,气隙中生成以B-B'为轴线的磁场
由于磁力线总是要通过磁阻最小的路径闭合,将使离磁极B-B'最近的转子齿2、4和定子B-B'对齐,即产生B-B'轴线方向的磁通
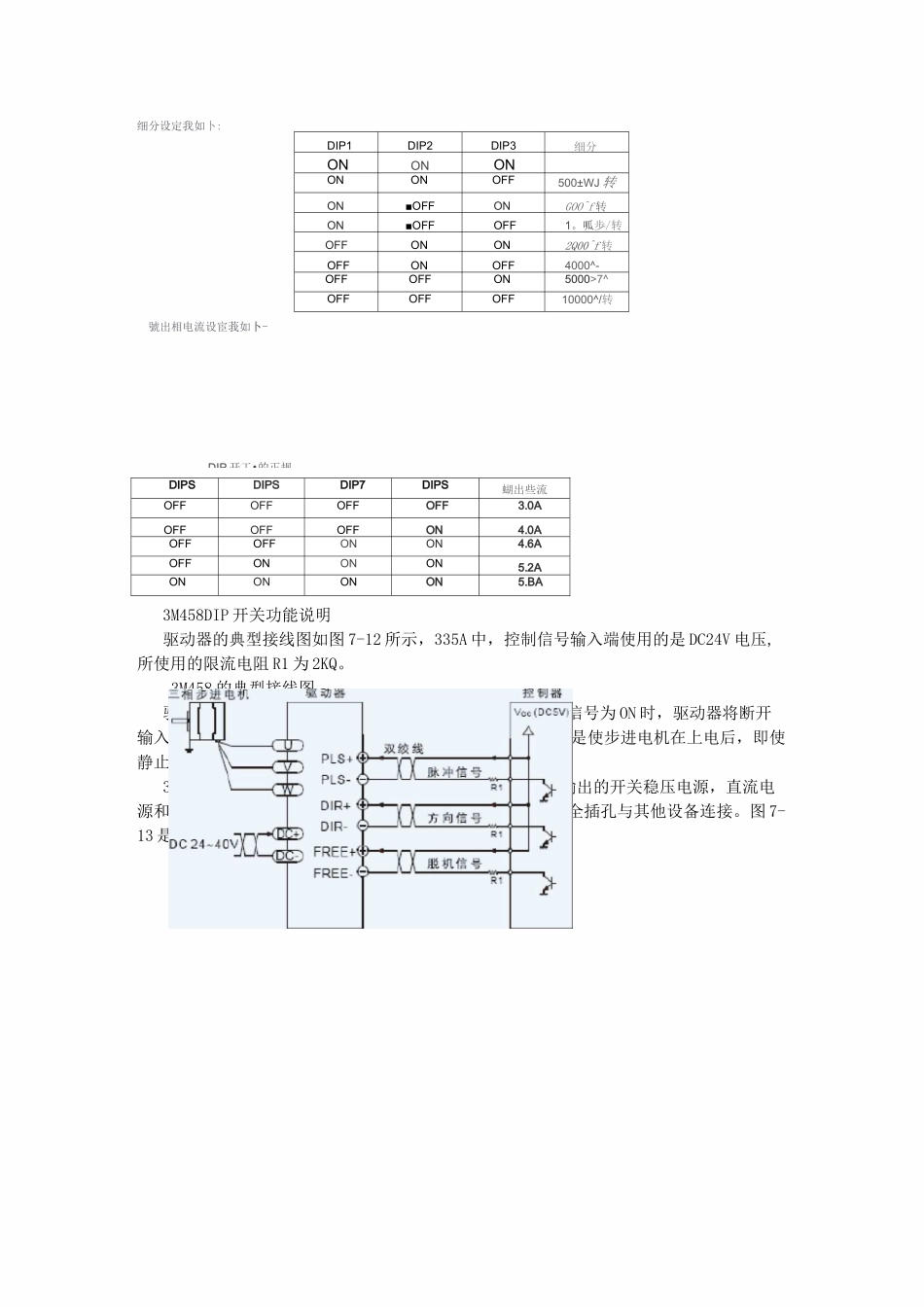
步进电机驱动器
C相绕组通电时,A、B两相不通电,气隙中生成以C-C'为轴线的磁场
由于磁力线总是要通过磁阻最小的路径闭合,将使离磁极C-C'最近的转子齿1、3和定子C-C'对齐,即产生C-C'轴线方向的磁通
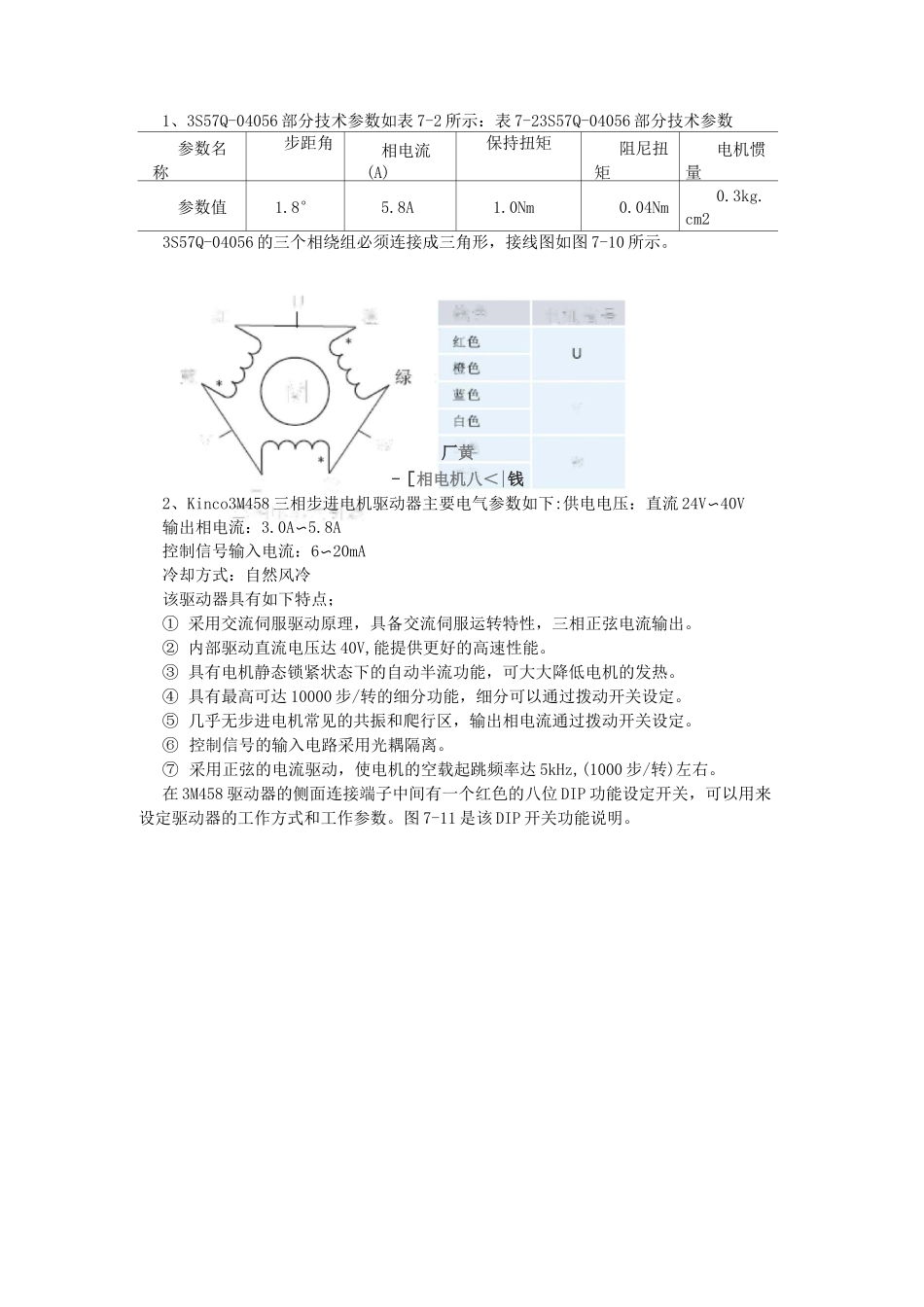
2、双三拍控制3、单、双六拍工作方式步进电机是Kinco三相步进电机3S57Q-04056,与之配套的驱动器为Kinco3M458三相绿1、3S57Q-04056部分技术参数如表7-2所示:表7-23S57Q-04056部分技术参数参数名称步距角相电流(A)保持扭矩阻尼扭矩