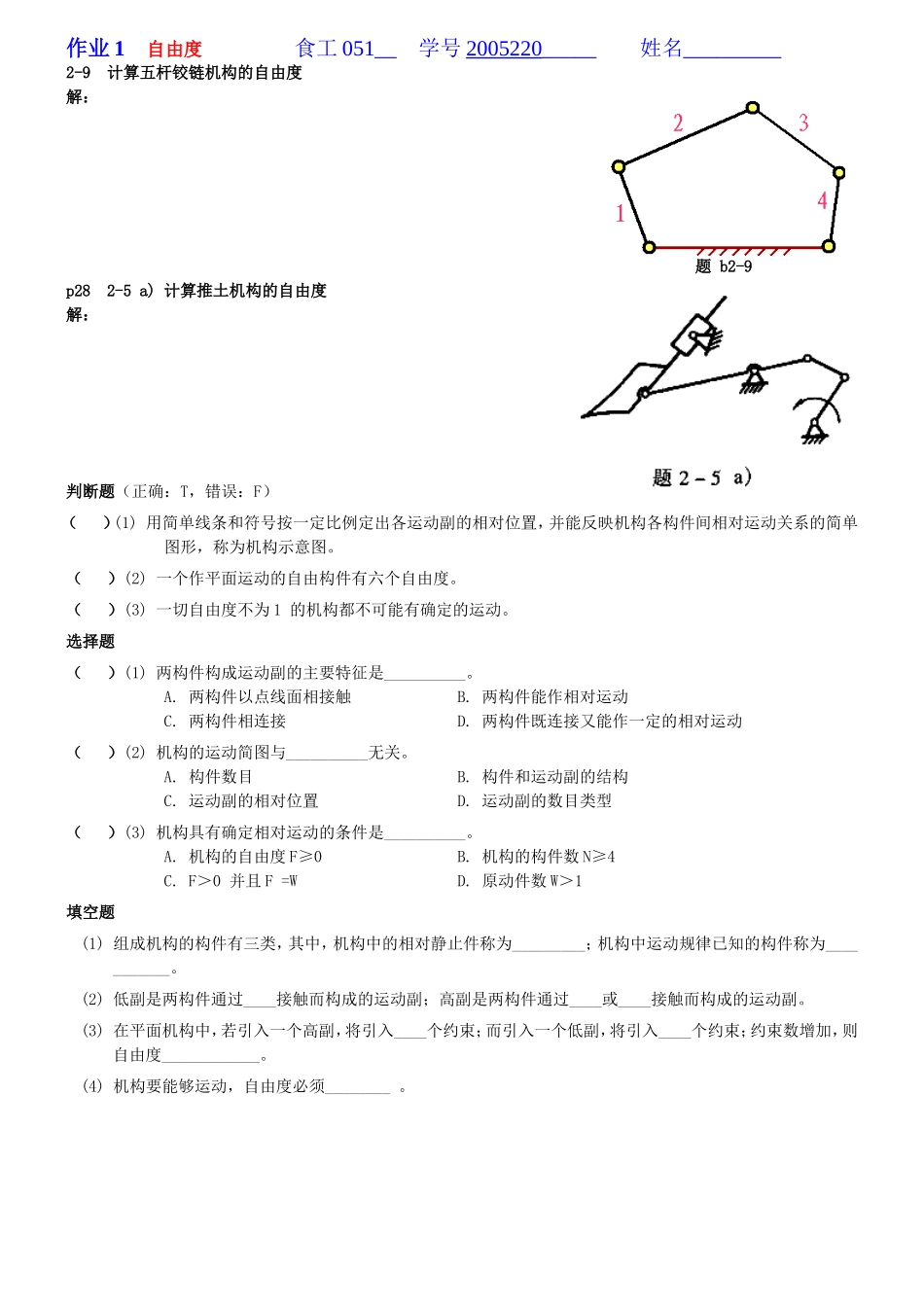
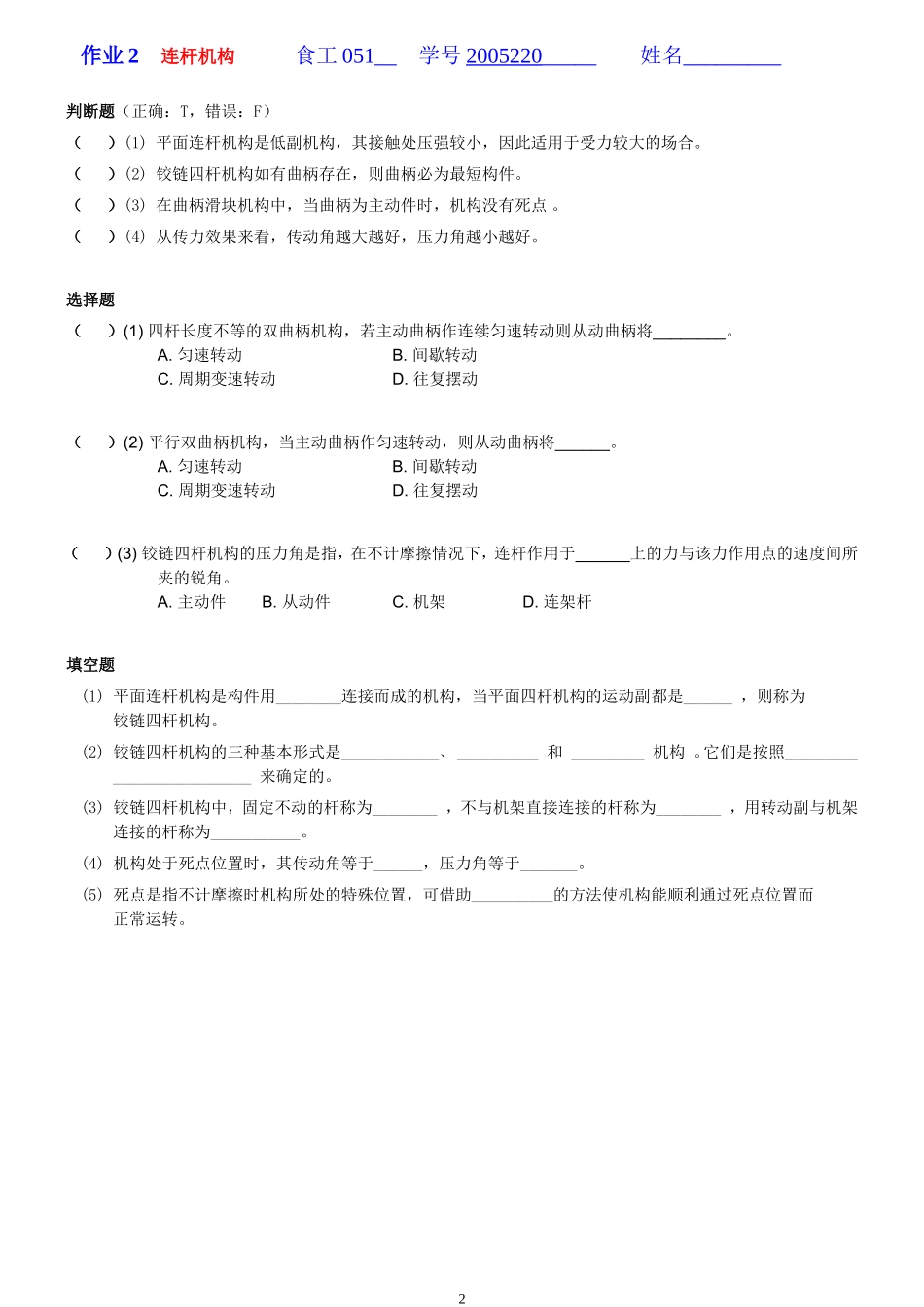
作业1自由度食工051__学号2005220_____姓名_________2-9计算五杆铰链机构的自由度解:题b2-9p282-5a)计算推土机构的自由度解:判断题(正确:T,错误:F)()(1)用简单线条和符号按一定比例定出各运动副的相对位置,并能反映机构各构件间相对运动关系的简单图形,称为机构示意图
()(2)一个作平面运动的自由构件有六个自由度
()(3)一切自由度不为1的机构都不可能有确定的运动
选择题()(1)两构件构成运动副的主要特征是__________
两构件以点线面相接触B
两构件能作相对运动C
两构件相连接D
两构件既连接又能作一定的相对运动()(2)机构的运动简图与__________无关
构件和运动副的结构C
运动副的相对位置D
运动副的数目类型()(3)机构具有确定相对运动的条件是__________
机构的自由度F≥0B
机构的构件数N≥4C
F>0并且F=WD
原动件数W>1填空题(1)组成机构的构件有三类,其中,机构中的相对静止件称为_________;机构中运动规律已知的构件称为___________
(2)低副是两构件通过____接触而构成的运动副;高副是两构件通过____或____接触而构成的运动副
(3)在平面机构中,若引入一个高副,将引入____个约束;而引入一个低副,将引入____个约束;约束数增加,则自由度____________
(4)机构要能够运动,自由度必须________
作业2连杆机构食工051__学号2005220_____姓名_________判断题(正确:T,错误:F)()(1)平面连杆机构是低副机构,其接触处压强较小,因此适用于受力较大的场合
()(2)铰链四杆机构如有曲柄存在,则曲柄必为最短构件
()(3)在曲柄滑块机构中,当曲柄为主动件时,机构没有死点
()(4)从传力效果来看,传