动力定位概述1
动力定位系统原理船舶动力定位系统就是依据所要求的船舶定位或运动指令,根据测量所得船舶的运动信息与环境信息,利用计算机进行复杂的实时计算,控制船舶主副推力装置产生一定推力与力矩,以实现预定的船舶姿态控制、定位控制或运动控制
船舶在海上除了受到本身推进器的推力以外,还受到风力、波浪与海流的外界作用力,从而产生6个自由度的运动,即纵荡、横荡、升沉、纵摇、横摇与艏遥
动力定位系统利用位置测量设备测出本身位置的变化,利用各类传感器测出船艏、纵横摇以及风力风向,再采用现代控制理论,建立船舶与推力器的数学模型,并采用多种控制方法,同多对船舶6个自由度运动风量以及风力风向的计算,对船舶各主副推力器的推力进行分配,从而控制船舶3个自由度的运动,即纵荡、横荡与艏摇
动力定位系统组成动力定位系统通常包括两大部分:测量控制部分和推力装置部分
测量控制部分测量控制部分主要包括:1)测量传感器:DGPS(或其他类型定位系统)-测量船位电罗经-测量艏向船舶垂直参考单元-测量船舶的纵摇、横摇与升沉风向风速仪-测量影响船舶动力的主要干扰力即风力2)控制部分:操作台:其台面上布置有操纵手柄、跟踪球、输入键盘、各种操纵按钮、指示灯与报警灯及显示屏,操纵台内部布置有一台高性能计算机
控制柜:其内部布置有实时处理计算机、存储器、输入/输出接口、供电模块以及大量接线端子;动力定位系统与位置测量设备、各种传感器以及主副推力器的电气联接均通过控制柜,系统供电也经由本柜
便携式手操终端推力装置部分1)动力部分:船舶主机、发电机2)推力部分:主推进器、舵、辅助推力装置(多用侧推器和全回转推进器)
动力定位的等级与精度动力定位等级国际海事组织IMO根据动力定位系统的功能以及设备冗余度,将动力定位系统分为三个等级:1级、2级与3级
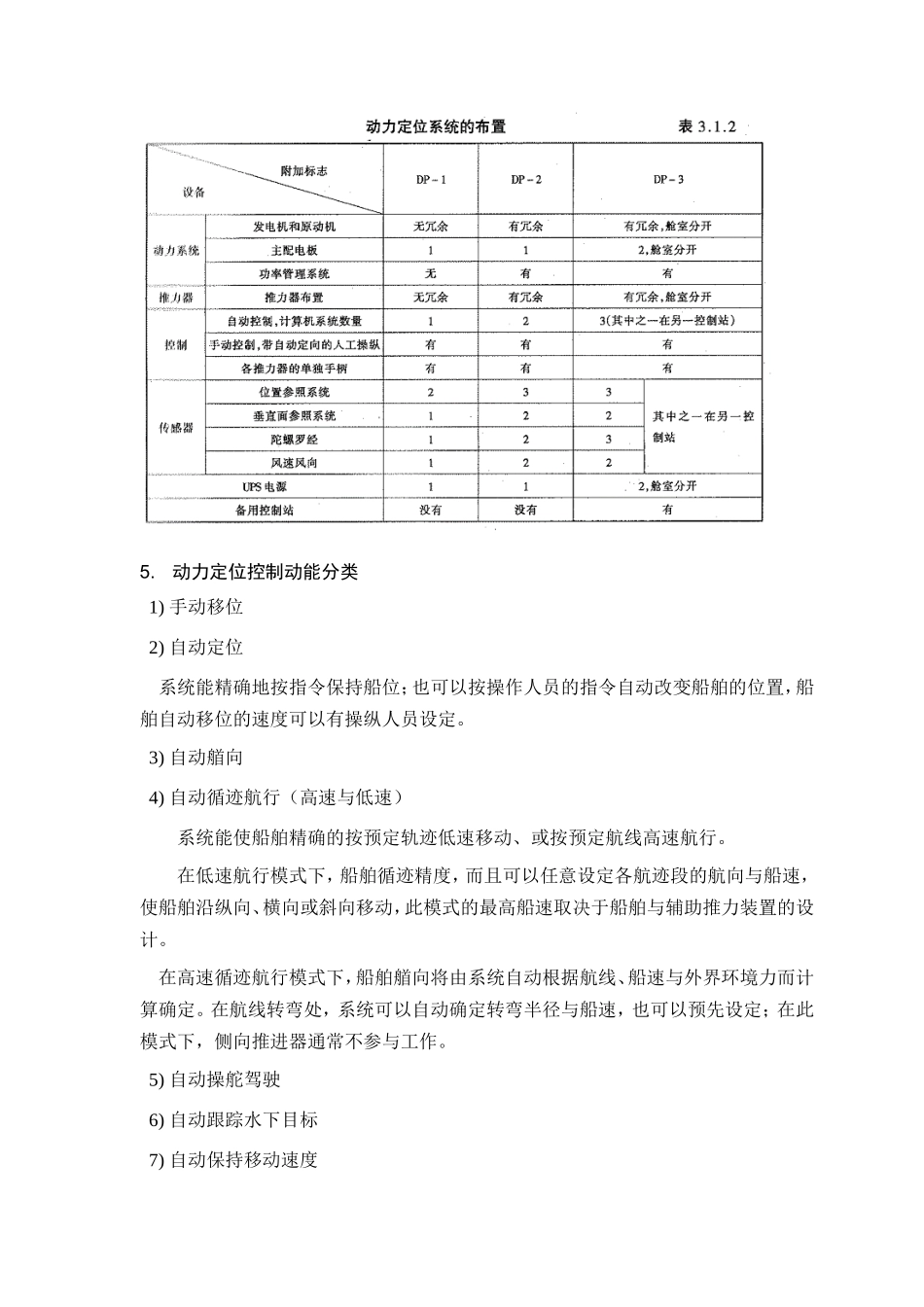
中国船级社根据动力定位系统不同的沉余度将动力定位等级DP1、DP2、DP3