定位算法调研一、定位算法的研究意义对于大多数应用,不知道传感器位置而感知的数据是没有意义的
传感器节点必须明确自身位置才能详细说明在什么位置或区域发生了特定事件,实现对外部目标的定位和追踪
用无线传感器网络进行目标的跟踪定位,就是综合传感器自身位置信息和网络节点与目标的关系信息,确定目标所处的地理位置
对于移动目标而言,连续不断的定位就是跟踪
传感器自身的位置信息,是实现目标定位跟踪的基础,而网络节点与目标的关系信息,则是实现目标定位跟踪的关键
另一方面,了解传感器节点位置信息还可以提高路由效率,可以为网络提供命名空间,向部署者报告网络的覆盖质量,实现网络的负载均衡以及网络拓扑的自配置等
尽管现有的许多定位系统和算法能够较好的解决WSN自身定位问题
但依然存在如下一些问题:(1)未知节点必须与锚点直接相邻,从而导致锚点密度过高
(2)定位精度依赖于网络部署条件
(3)没有对距离/角度测量误差采取抑制措施,造成误差传播和误差积累,定位精度依赖于距离/角度测量的精度
(4)依靠循环求精过程抑制测距误差和提高定位精度,虽然循环求精过程可以明显地减小测距误差的影响,但不仅产生了大量的通信和计算开销,而且因无法预估循环的次数而增加了算法的不确定性
(5)算法收敛速度较慢
因此必须采用一定的机制改进或者避免以上问题,从而实现更高精度的WSN自身定位
二、定位算法的研究现状从1992年AT&TLaboratoriesCambridge开发出室内定位系统ActiveBadge至今,研究者们一直致力于这一领域的研究
事实上,每种定位系统和算法都用来解决不同的问题或支持不同的应用,它们在用于定位的物理现象、网络组成、能量需求、基础设施和时空的复杂性等许多方面有所不同
根据定位算法中对节点位置的不同计算方式,可以分为集中式定位算法以及分布式定位算法
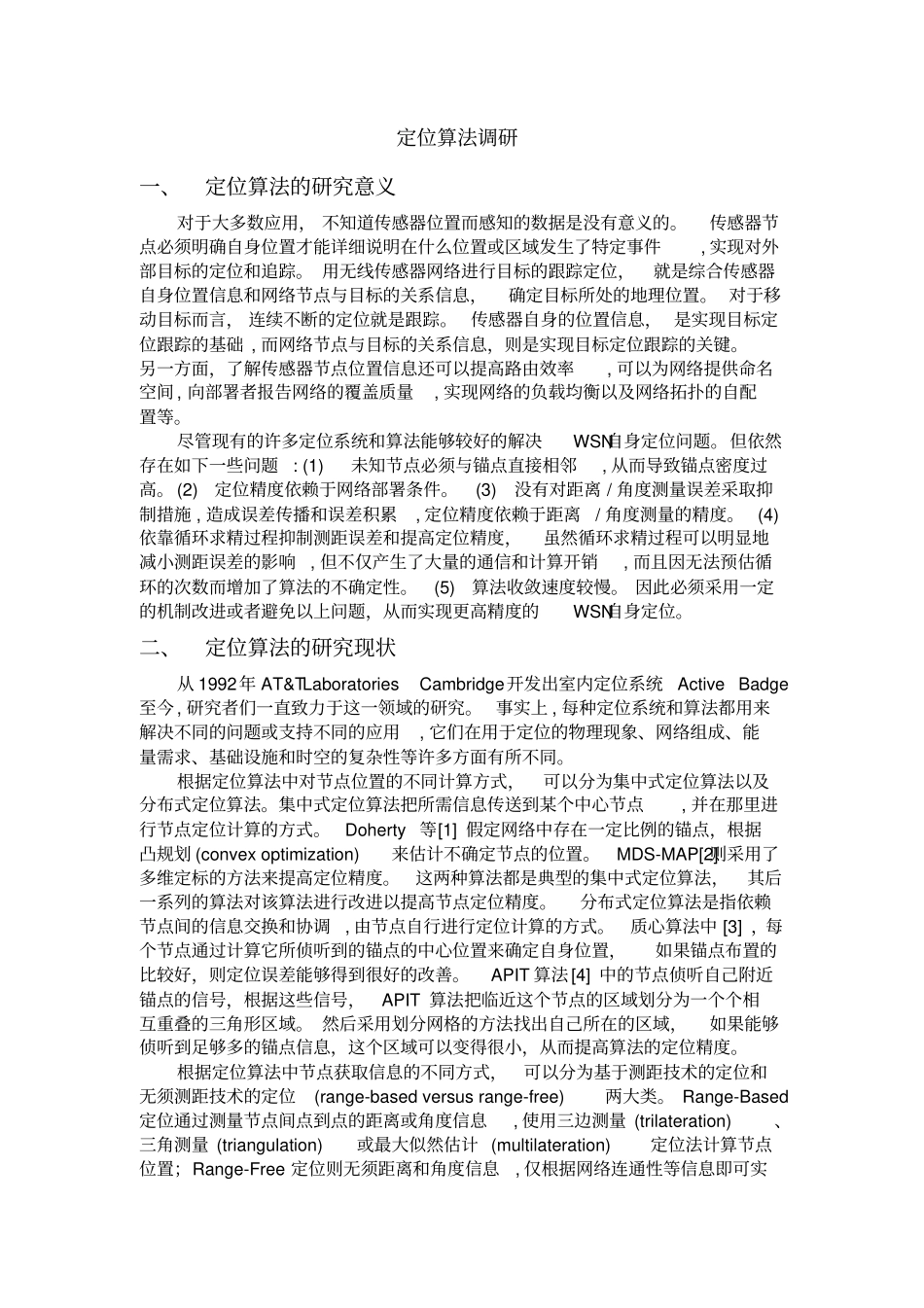
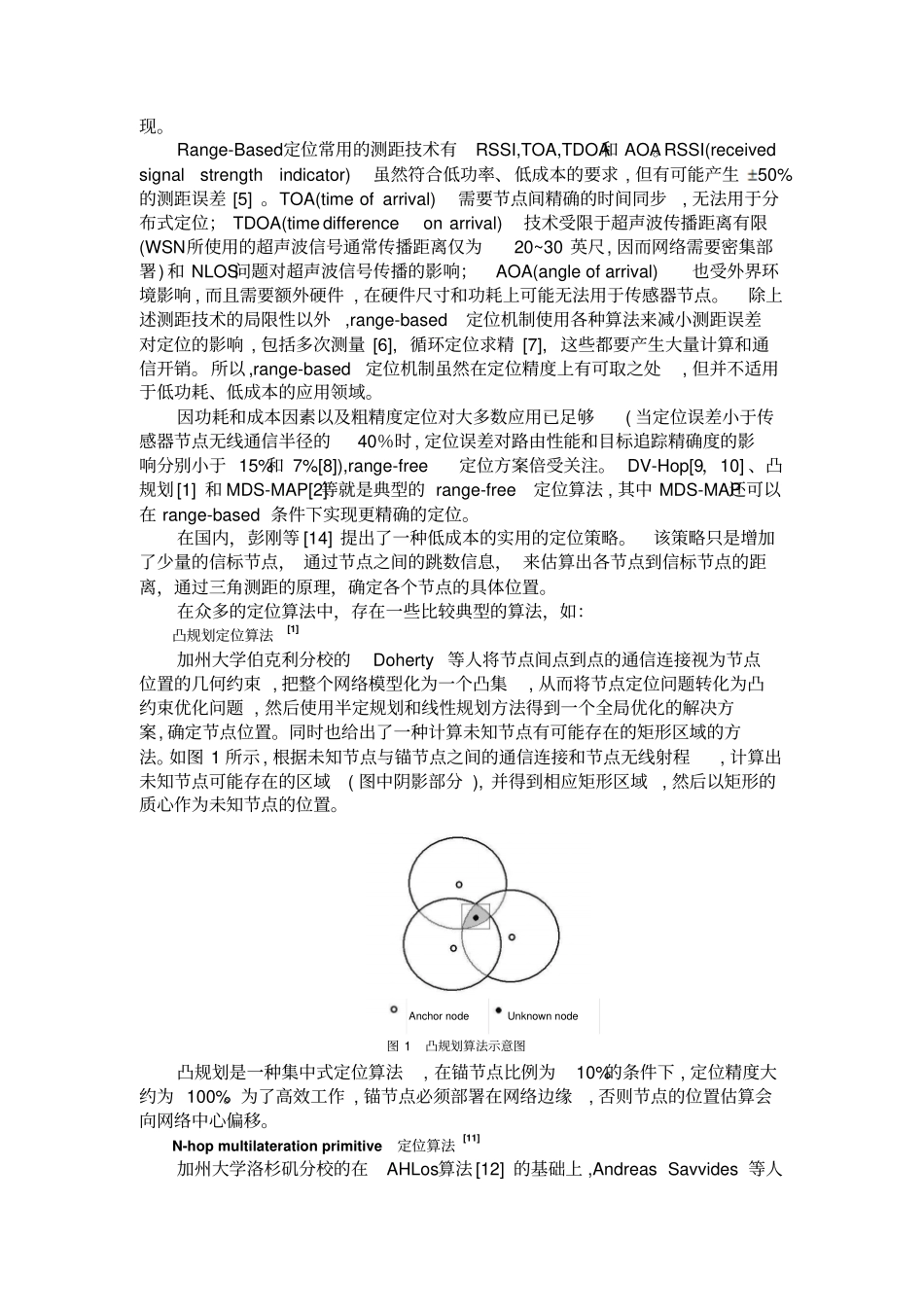
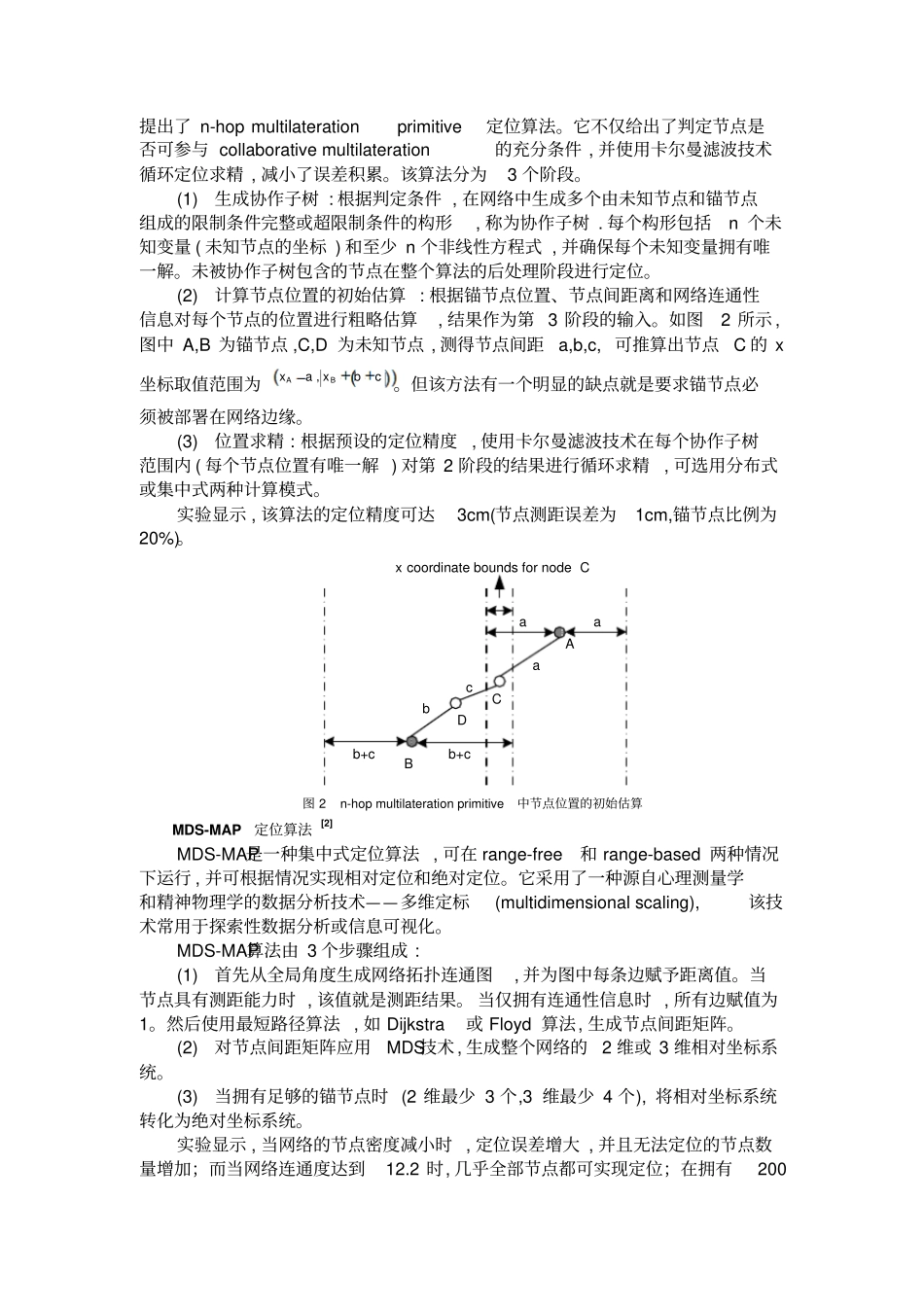
集中式定位算法把所需信息传送到某个中心节点,并