1单元21闭环控制器的实用设计方法实际闭环控制器设计可以事先研究某些典型系统的传函模式,设计控制器时只需根据控制性能要求套用所建典型系统模式的开环传函,然后针对具体被控对象的传函结构和参数配置控制器的结构和参数,使包含被控对象和控制器的整个系统开环传函符合所期待的典型工作模式
不过,这种套用需要清醒地理解线性系统内部结构关系,且应了解结构和参数变化对系统特性的影响,这样方能抓住主要矛盾,以较简单的控制器结构和较小的参数变化应对较为广泛的实际应用场合与被控对象
矚慫润厲钐瘗睞枥庑赖
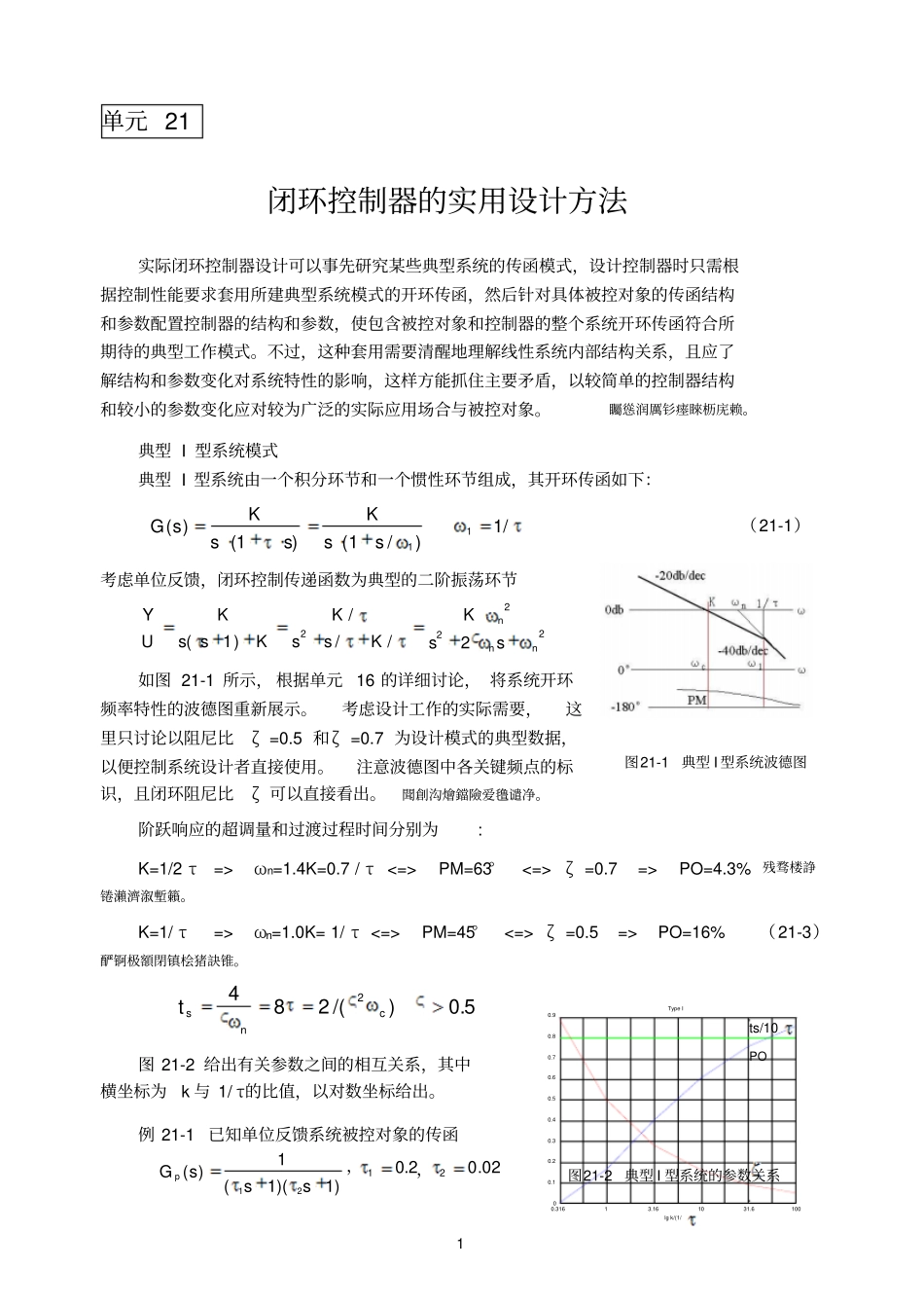
典型I型系统模式典型I型系统由一个积分环节和一个惯性环节组成,其开环传函如下:/1)/1()1()(11ssKssKsG(21-1)考虑单位反馈,闭环控制传递函数为典型的二阶振荡环节222221nnnssK/K/ss/KK)s(sKUY如图21-1所示,根据单元16的详细讨论,将系统开环频率特性的波德图重新展示
考虑设计工作的实际需要,这里只讨论以阻尼比ζ=0
7为设计模式的典型数据,以便控制系统设计者直接使用
注意波德图中各关键频点的标识,且闭环阻尼比ζ可以直接看出
聞創沟燴鐺險爱氇谴净
阶跃响应的超调量和过渡过程时间分别为:K=1/2τ=>ωn=1
7/τPM=63°ζ=0
7=>PO=4
3%残骛楼諍锩瀨濟溆塹籟
K=1/τ=>ωn=1
0K=1/τPM=45°ζ=0
5=>PO=16%(21-3)酽锕极額閉镇桧猪訣锥
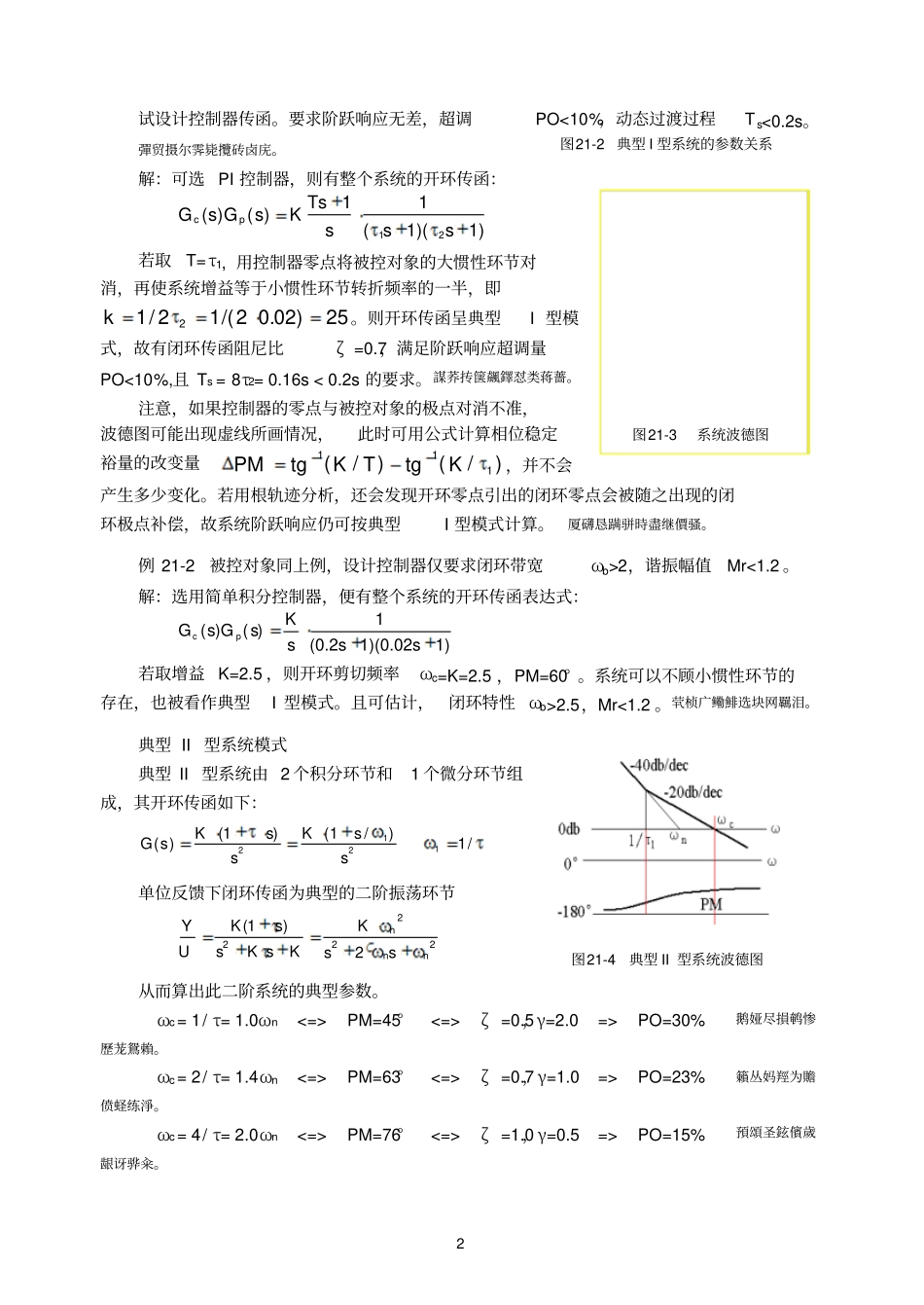
0)/(2842cnst图21-2给出有关参数之间的相互关系,其中横坐标为k与1/τ的比值,以对数坐标给出
例21-1已知单位反馈系统被控对象的传函1)s1)(s(1)(G21ps,02
021,图21-1典型I型系统波德图图21-2典型I型系统的参数关系0
161031
610000