1/9航海电子系统的复习思考一、陀螺罗经的典型电路分析,如:传向系统、随动系统的基本构成、电路特色等
以Sperry系列罗经为例:随动系统由随动传感器、随动放大器、方位电机组成;传向系统由步进式发送器、控制电路、步进式分罗经组成;原理框图如下图所示:电路特色:1
随动传感器采用E型变压器,随动信号的大小取决于衔铁偏离E型铁芯中间的大小,随动信号的相位取决于衔铁偏离的方向;2
传向系统采用直流步进式传向系统二、在现代水声导航仪器中,如:测深仪、声相关计程仪和多普勒计程仪的工作原理
如何实现向水下发射超声波
测深仪工作原理
测深仪工作原理:2/9在船底安装有能发射超声波的换能器A和接受换能器B,A与B之间的距离为S,称之为基线
发射换能器A以间歇的形式向水下发射频率为20—200KHZ的超声波,超声波经海底一部分被反射,反射回来的一部分被接受换能器B接受
如果能测出声波自发射换能器A发射至接受换能器B接受所经历的时间t,即可求出水深
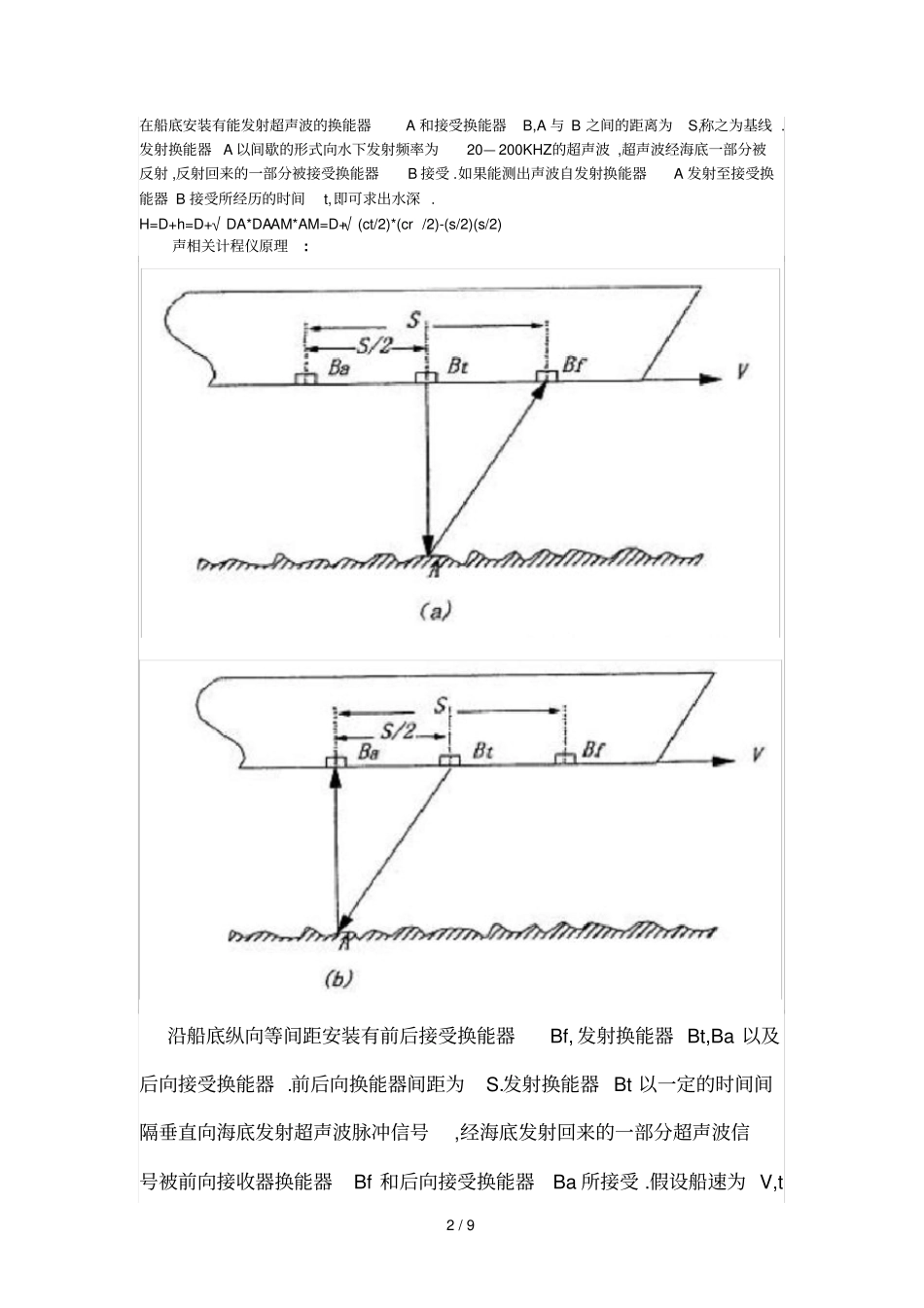
H=D+h=D+√DA*DA-AM*AM=D+√(ct/2)*(cr/2)-(s/2)(s/2)声相关计程仪原理:沿船底纵向等间距安装有前后接受换能器Bf,发射换能器Bt,Ba以及后向接受换能器
前后向换能器间距为S
发射换能器Bt以一定的时间间隔垂直向海底发射超声波脉冲信号,经海底发射回来的一部分超声波信号被前向接收器换能器Bf和后向接受换能器Ba所接受
假设船速为V,t3/91时刻,如(a)图,Bt正好位于点A正上方,Bt发射的脉冲信号经A点反射后被Bf接受,经时间间隔T时,即t2时刻,船舶向前航行一小段航程
接受换能器Ba正好位于海底A点正上方
此时Bt发射的脉冲信号经A点反射后刚好被Ba接受
Bf,Ba均接受来自海底A点反射回来的信号,在t1,t2时刻,两回波变化曲线几乎完全相同,经比对求出时间T
T=S/2/V=S/(2V)则V=S/(2