十点校正只针对B4的机器人,V6的机器人最好用枪规来校正,在编程时将机器人的动作角度越大越好,而且要在不同的方向和不同的角度,编辑的程序最少要六步,OTC要求要十步如下图,在将自己编写的程序输入在以下图中假如我编写的是程序1,按下“执行健”即可V6机器人校正
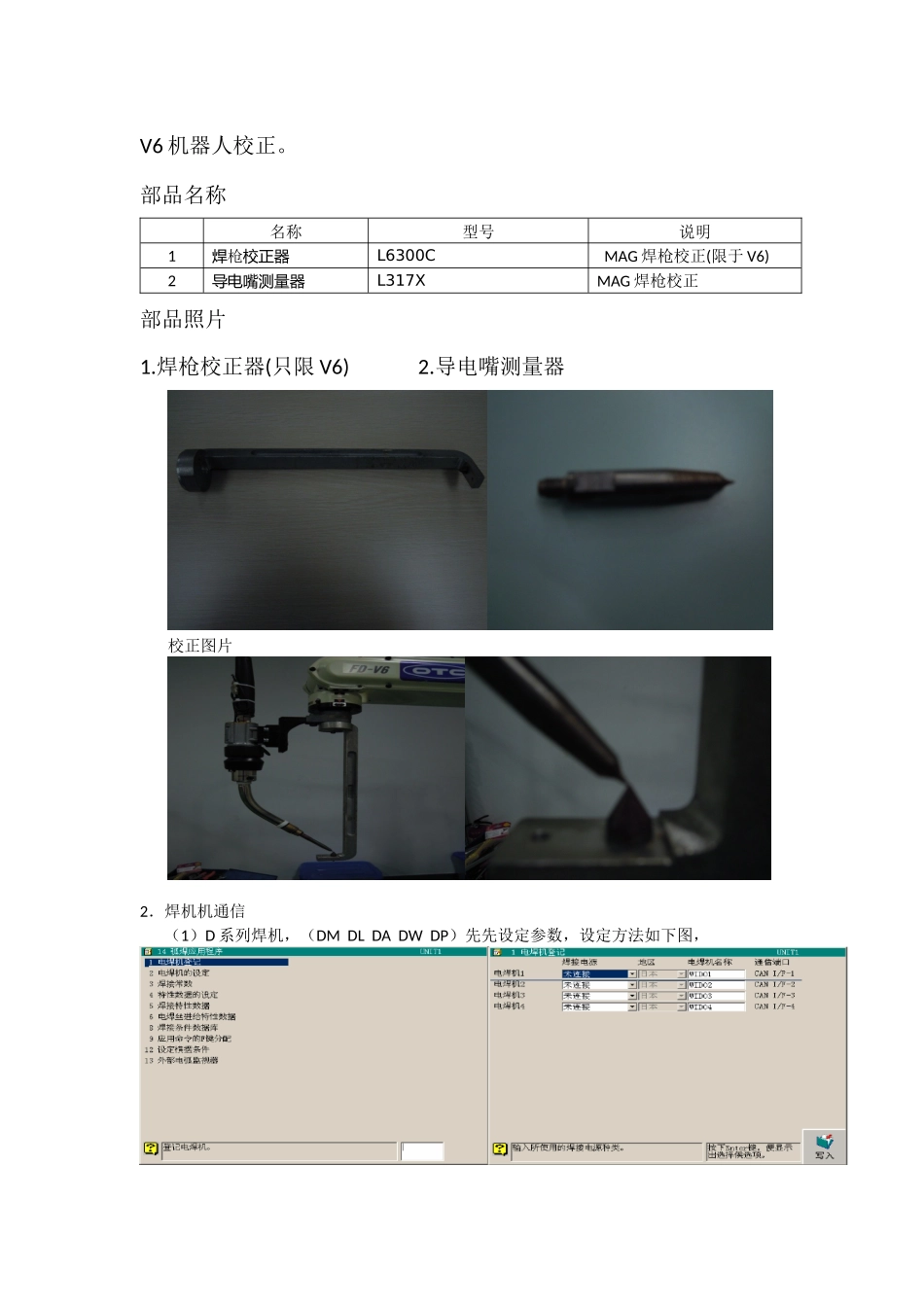
部品名称名称型号说明1焊枪校正器L6300CMAG焊枪校正(限于V6)2导电嘴测量器L317XMAG焊枪校正部品照片1
焊枪校正器(只限V6)2
导电嘴测量器校正图片2.焊机机通信(1)D系列焊机,(DMDLDADWDP)先先设定参数,设定方法如下图,选择第一项电焊机登记如图然后选择你选择的焊机如(DP、DM等等)以下是现在所用的设备如图这个完成之后你按下F12写入,写入后机器人,会回到上一画面选择电焊机的设定如图将机构选择成现在机器人本体的机构
连接类型为单独按下F12(写入)写入后会回到上一画面
选择特性数据设定如图9
移动光标如图10
按下F8选择如下图选择你需要的数据(数据是根据客户用的焊丝,气体和焊接方法来选择的)然后按下Enter如图12
移动光标如图13
按下F8(选择)如图14,选择机器人上安装的送丝机的型号最接近的项
按下ENTER如图15
选择好之后按下F12(写入)如图16当中出现以上画面时,有可能会出现报警只需要按下R复位键即可再次按下R复位
回到机器人起动画面如图17
选择之后将焊机电源打开,开机是按下收弧+F(内部功能)必须同时按下保持,开机之后出现LP为止放开如图18
放开之后在试教器上选择按下动作可能+F5健(必须同时按下)
选择控制环境如图19选择电弧机的初始化如图20,电焊机初始化进入以后机器会出现机器ROM现在的版本跟焊机现在的版本更新的版本
出现以上画面之后按下F12更新如图21按下更新之后会出现一个画面必须全部选择中如图22
机器人会自动验证,更新如图24,