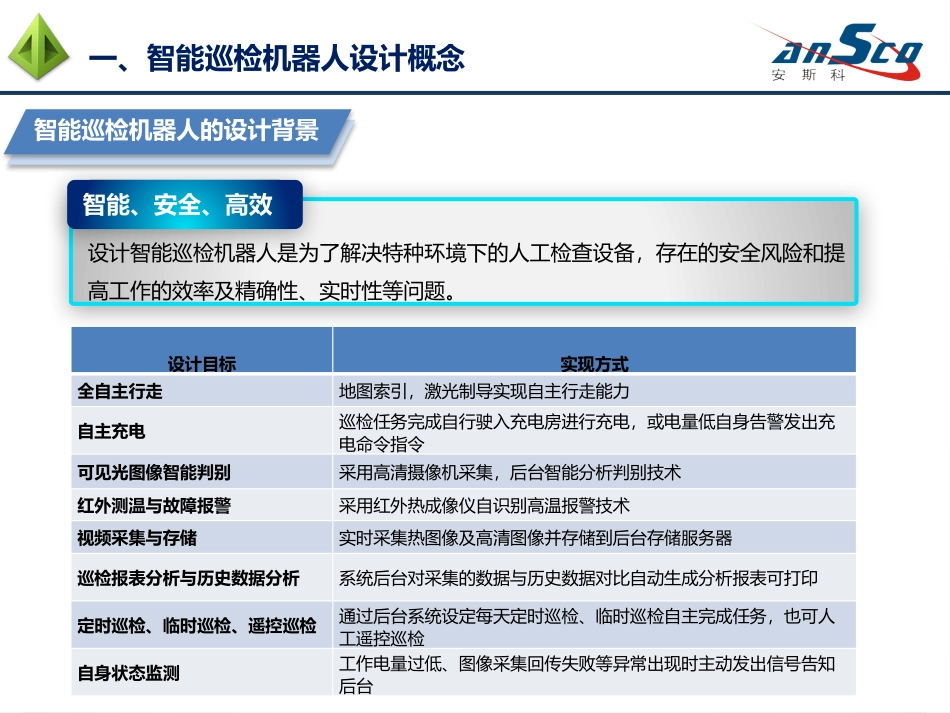
智能巡检机器人介绍智能巡检机器人应用环境三智能巡检机器人技术亮点二一智能巡检机器人设计概念Contents目录智能巡检机器人投资效益四一、智能巡检机器人设计概念智能巡检机器人的设计背景设计智能巡检机器人是为了解决特种环境下的人工检查设备,存在的安全风险和提高工作的效率及精确性、实时性等问题
智能、安全、高效设计目标实现方式全自主行走地图索引,激光制导实现自主行走能力自主充电巡检任务完成自行驶入充电房进行充电,或电量低自身告警发出充电命令指令可见光图像智能判别采用高清摄像机采集,后台智能分析判别技术红外测温与故障报警采用红外热成像仪自识别高温报警技术视频采集与存储实时采集热图像及高清图像并存储到后台存储服务器巡检报表分析与历史数据分析系统后台对采集的数据与历史数据对比自动生成分析报表可打印定时巡检、临时巡检、遥控巡检通过后台系统设定每天定时巡检、临时巡检自主完成任务,也可人工遥控巡检自身状态监测工作电量过低、图像采集回传失败等异常出现时主动发出信号告知后台一、智能巡检机器人设计概念智能巡检机器人的结构组成智能巡检机器人主要组成部分:四驱动底盘、激光传感器、智能云台、可见光摄像机、红外热像仪以及其他部件
一、智能巡检机器人设计概念各组成结构的简要说明最先进的测温热像仪非接触式自识别测温技术最新气体检测仪,自动判断SF6气体泄漏点技术,最小检漏量达到0
001毫升/秒军用级别四驱动底盘,激光制导自主巡航技术高精度智能型云台,水平360°、垂直180°;预置精度+/-0
测温热成像仪、气体检测仪、军用级四驱底盘、智能云台等一、智能巡检机器人设计概念采用视觉识别技术,自主完成巡检任务智能巡检机器人用于替代人工完成变电站巡检中遇到的急、难、险、重和重复性工作
可以加载红外热成像仪、气体检测仪、高清摄像机等有关的电站设备检测装置,以自主和遥控的方式,代替人对室外高压设备进行巡测,