1 / 7 摆式陀螺寻北仪振动误差分析(1982
15.德文资料口述译文整理) 通过调节摆的自振频率可以消除因汽车振动的干扰,但是在精度要求为 S 3 时,特别是建筑基础和工业交通引起的随机振动的干扰与陀螺摆动相重叠将使振动加大
当外界干扰正好在自振频率之内时最为危险
目前的陀螺寻北仪无附加阻尼器,因此在振动振幅接近1 m 时寻北误差将会超过允许值
在研制 MW77和 GYROMAT 时曾经用两台仪器(有阻尼和无阻尼的)在振动台上进行模拟试验
所得结果表明了仪器对基面振动的敏感程度
2 摆式陀螺寻北仪的振动形式在外界干扰下,摆式陀螺寻北仪有7 种不同的振动形式 : a
方位进动 ; b
章动 ; c
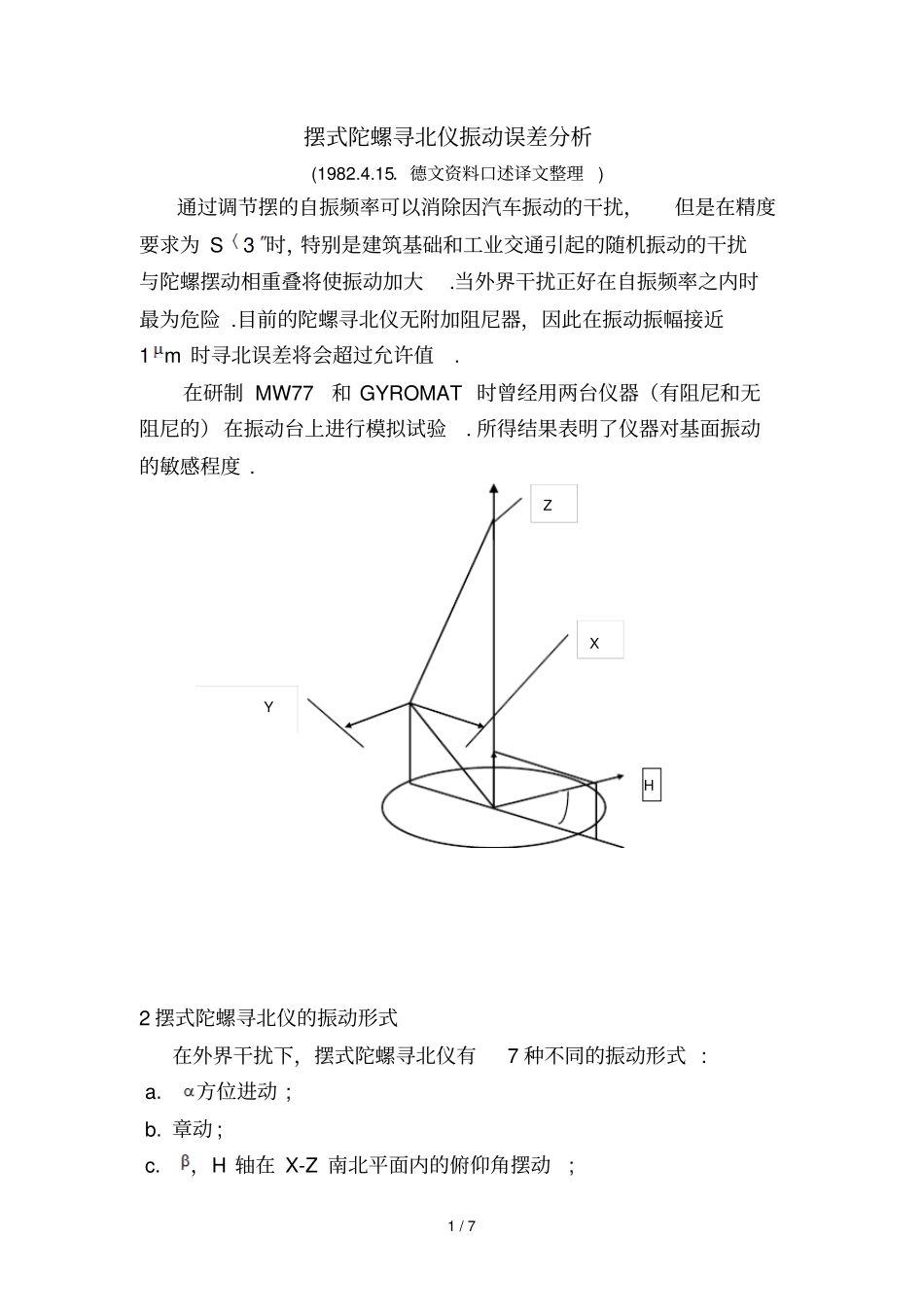
,H 轴在 X-Z 南北平面内的俯仰角摆动; Z X Y H 2 / 7 d
,陀螺房在南北平面X-Z 内的平移摆动 ; e
,陀螺房在东西平面Y-Z 内的平移摆动 ; f
反向摆动即在南北平面X-Z 内的 (PXZ); g
反向摆动即在东西平面Y-Z 内的(gPYZ)
由于转子的陀螺力矩的作用,及反 摆动一直受到抑制,因此与此有关的振动干扰误差只在校准时才考虑(即在转子不转时的零位测定时才考虑 )
对外界干扰最为敏感的是PYZ 即 和反向 振动
图 1 为各种振动形式的说明
为了说明图 3,4 中的影响 ,需要从它们的作用机理进行分析
在 X-Y 方向上的加速度,x y ,同时在 Z 轴上将产生力矩
第一个方程可得到一个力矩,第二个方程也可得到一个力矩,外部激励函数为x txty tytz t000s i ns i nZ=0 即上悬挂点无垂直运动
强迫运动为xtp--- 及激励与强迫运动之间相位
可以得到以下几个公式代入方程 1,2 得到 Mt再用三角变换得到 (3),(4) (3),(4) 中的第一项为整流项, 第二项为振动