TVT-99D 机械手模型一、实验目的1
掌握 PLC 控制的基本原理、步进电机及驱动模块、直流电机、传感器、开关电源等器件的原理及使用
掌握计算机监控软件,掌握计算机上位监控3
掌握位置控制技术、气动技术二、实验设备1
机械手模型 1 台2
计算机 1 台3
编程电缆 1 根三、实验原理与步骤1
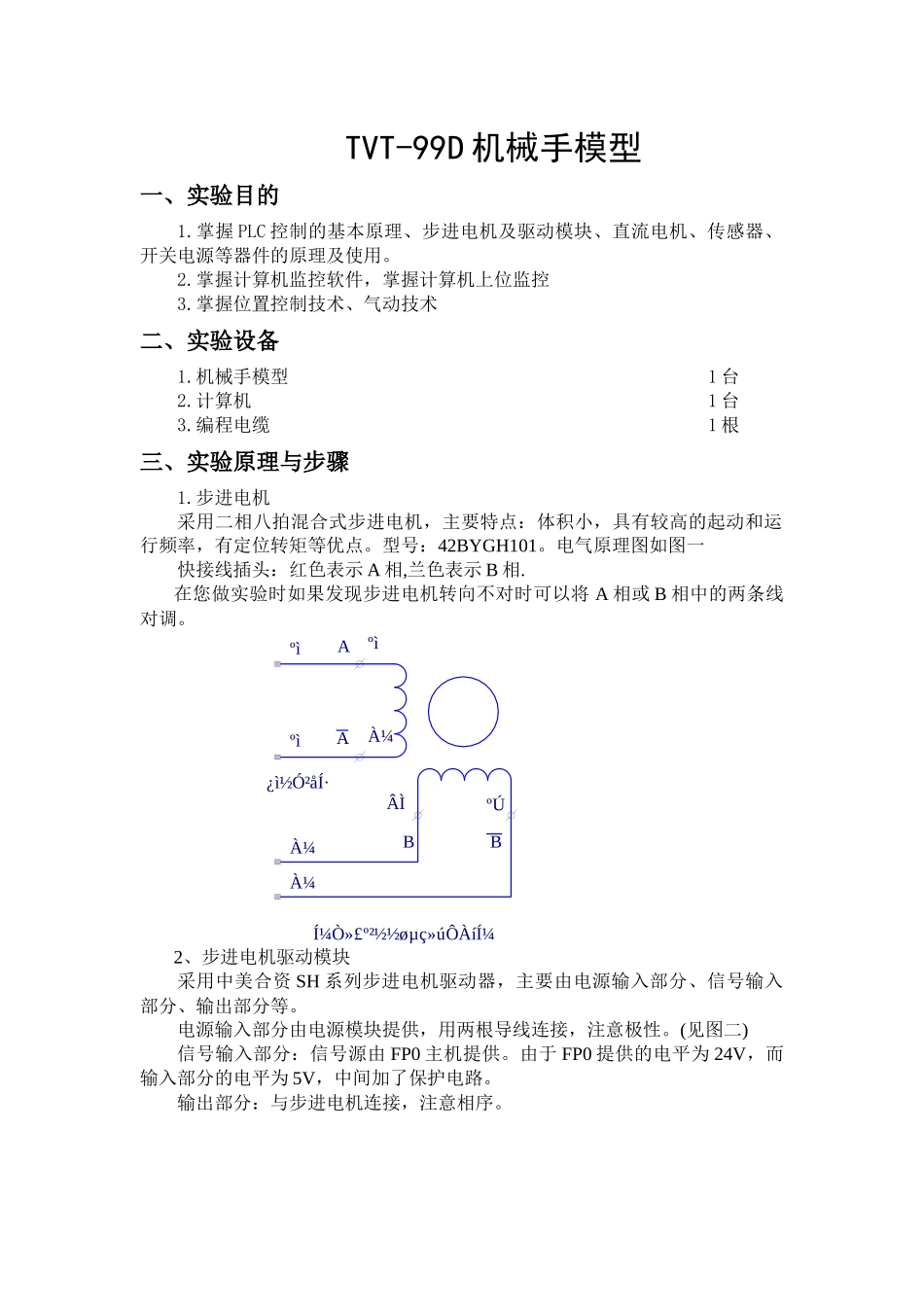
步进电机采用二相八拍混合式步进电机,主要特点:体积小,具有较高的起动和运行频率,有定位转矩等优点
型号:42BYGH101
电气原理图如图一快接线插头:红色表示 A 相,兰色表示 B 相
在您做实验时如果发现步进电机转向不对时可以将 A 相或 B 相中的两条线对调
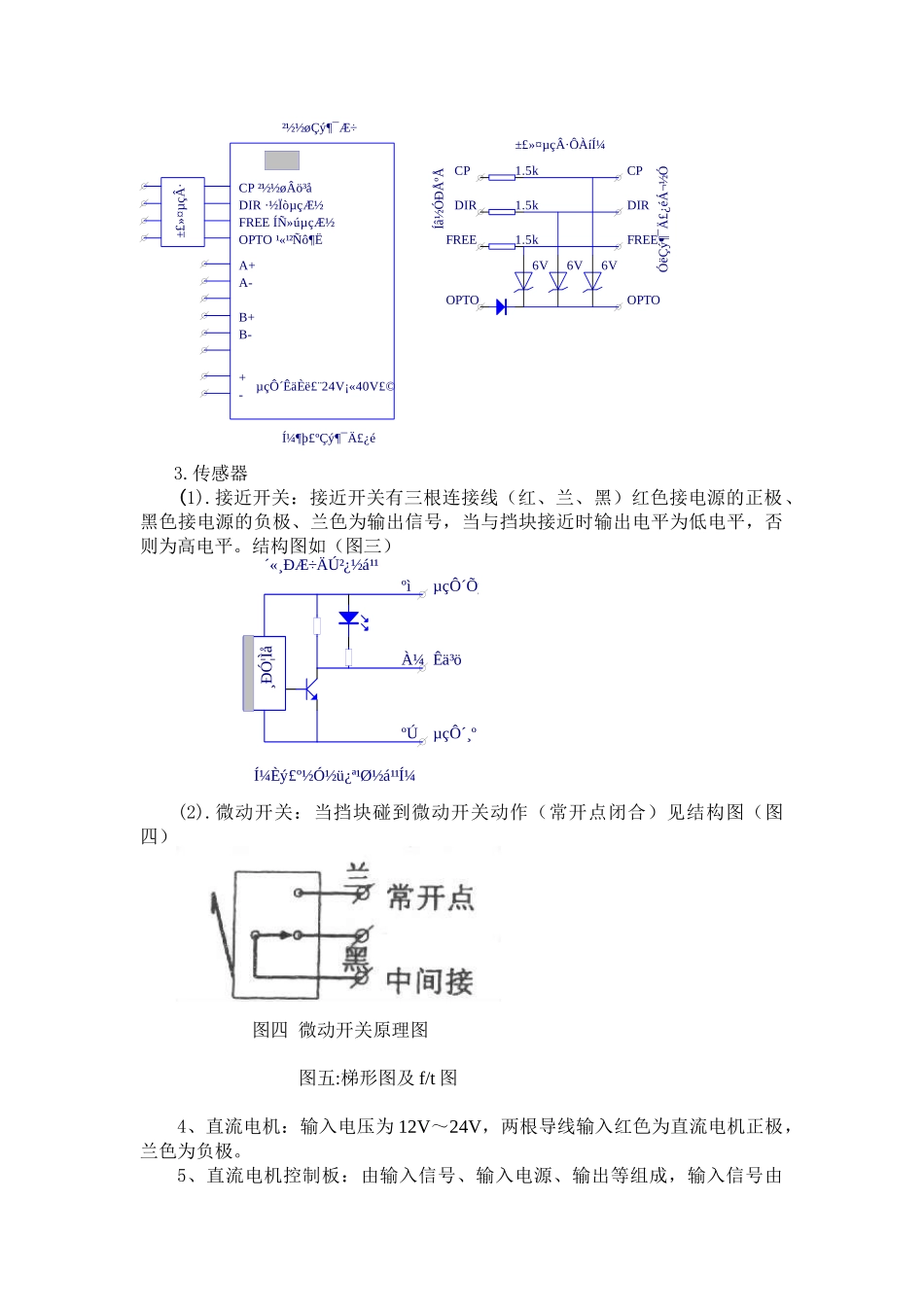
2、步进电机驱动模块采用中美合资 SH 系列步进电机驱动器,主要由电源输入部分、信号输入部分、输出部分等
电源输入部分由电源模块提供,用两根导线连接,注意极性
(见图二)信号输入部分:信号源由 FP0 主机提供
由于 FP0 提供的电平为 24V,而输入部分的电平为 5V,中间加了保护电路
输出部分:与步进电机连接,注意相序
AABBºìÀ¼Â̺ÚÀ¼À¼ºìºì¿ì½Ó²åͷͼһ£º²½½øµç»úÔÀíͼ3
传感器(1)
接近开关:接近开关有三根连接线(红、兰、黑)红色接电源的正极、黑色接电源的负极、兰色为输出信号,当与挡块接近时输出电平为低电平,否则为高电平
结构图如(图三)(2)
微动开关:当挡块碰到微动开关动作(常开点闭合)见结构图(图四) 图四 微动开关原理图 图五:梯形图及 f/t 图4、直流电机:输入电压为 12V~24V,两根导线输入红色为直流电机正极,兰色为负极
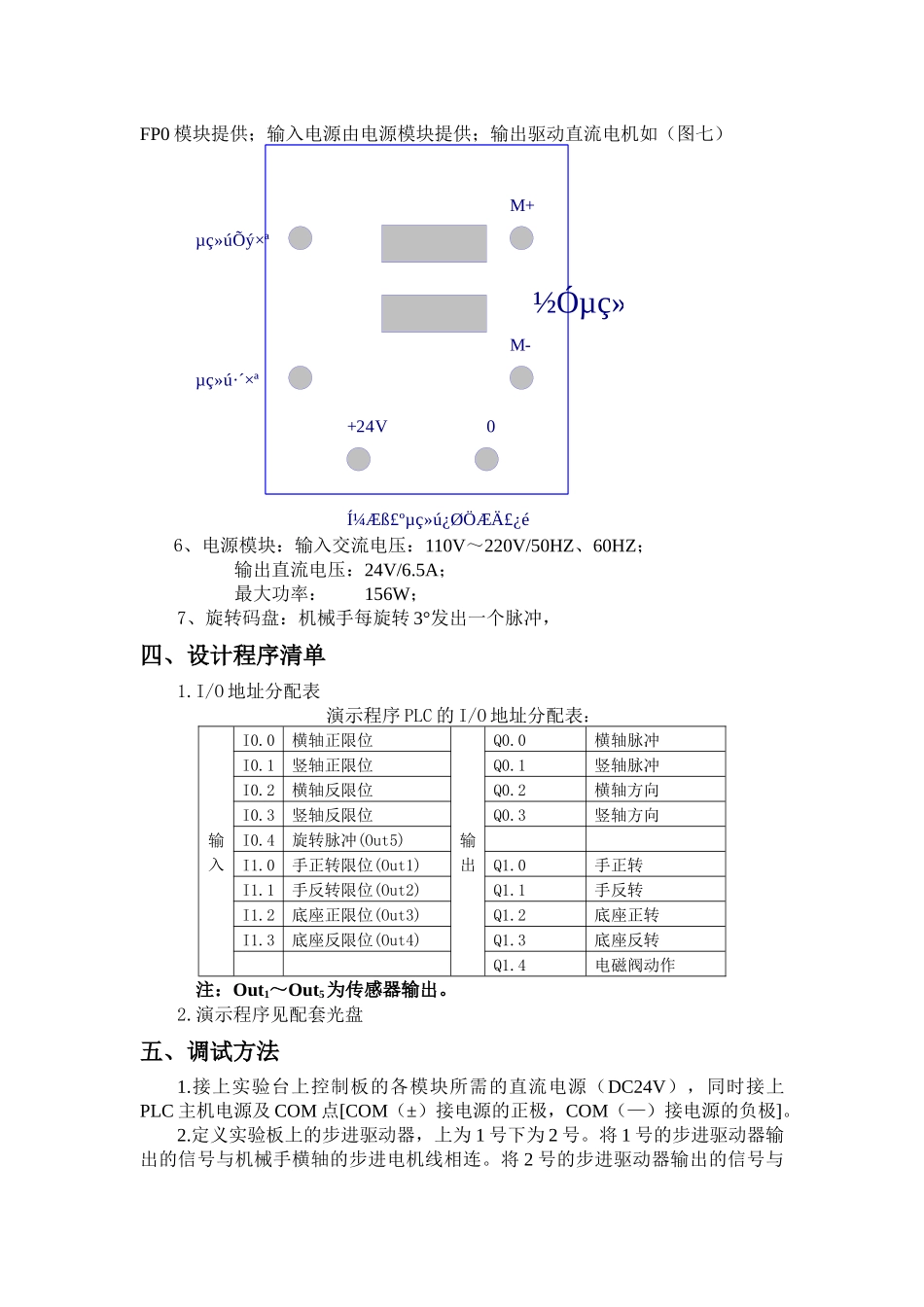
5、直流电机控制板:由输入信号、输入电源、输出等组成,输入信号由CP²½½øÂö³åDIR·½ÏòµçƽFREEÍÑ»úµçƽOPTO¹«¹²Ñô¶ËA+A-B+B-+-µçÔ´ÊäÈ루24V¡«40V£