1 一、课题内容 用PLC控制三相六拍步进电机,其控制要求如下: 1. 三相步进电动机有三个绕组:A、B、C, 正转通电顺序为:A→AB→B→BC→C→CA→A 反转通电顺序为:A→CA→C→BC→B→AB→A 2. 要求能实现正、反转控制,而且正、反转切换无须经过停车步骤
3. 具有两种转速: 1号开关合上,则转过一个步距角需 0
2号开关合上,则转过一个步距角需 0
二、课题要求 1.根据题意,I/O编址,编制控制程序
并对梯形图程序加以说明
2.完成课程设计说明书
三、课题设计 3
1分析工艺流程 本课题要求步进电机是三相六拍运行 三相六拍正转通电顺序为:A→AB→B→BC→C→CA 三相六拍反转通电顺序为:A→CA→C→BC→B→AB 所以我们可以根据通电的顺序,给相应的相序分配相应的地址,按照控制的要求我们就可以给出相应的控制程序
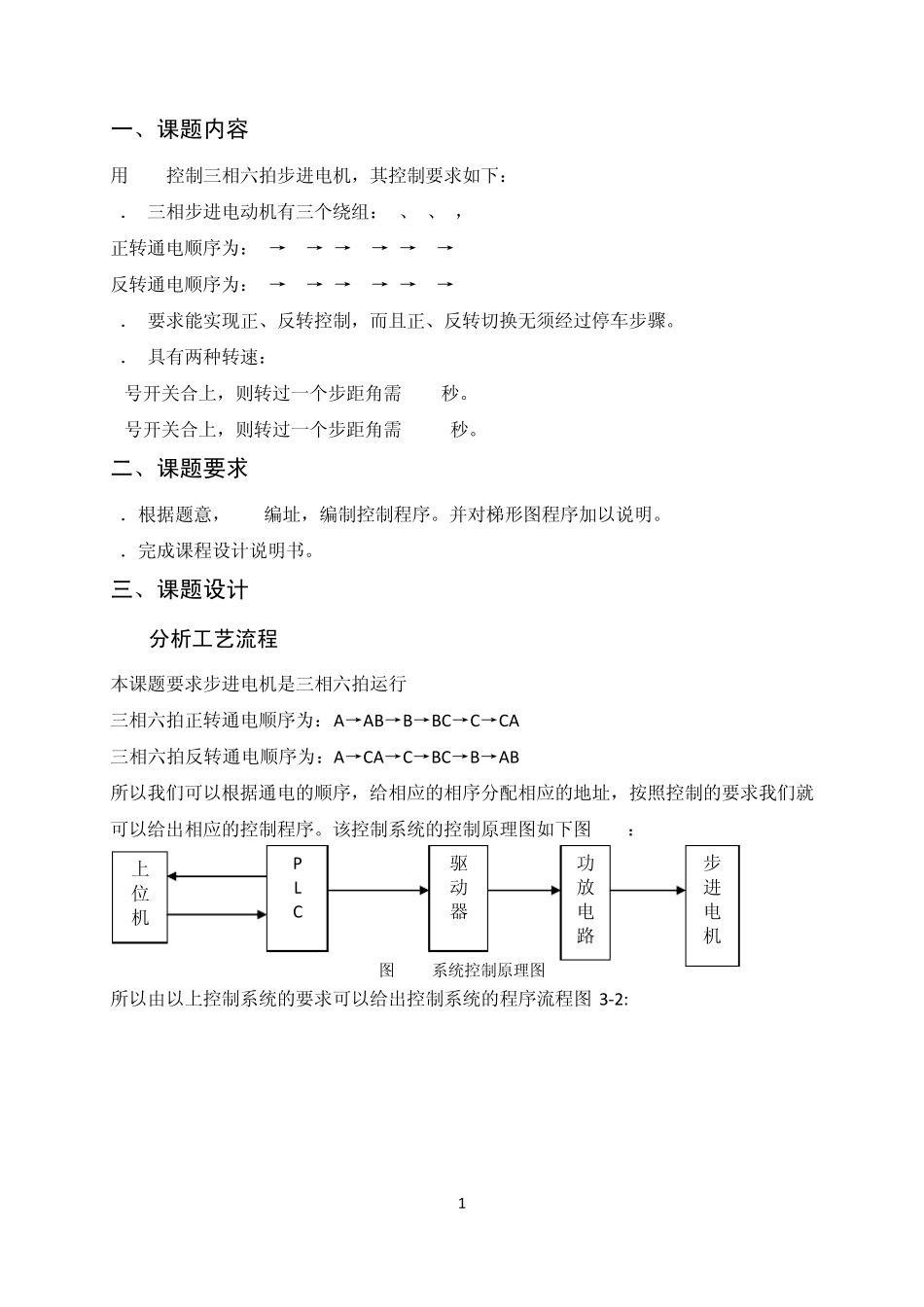
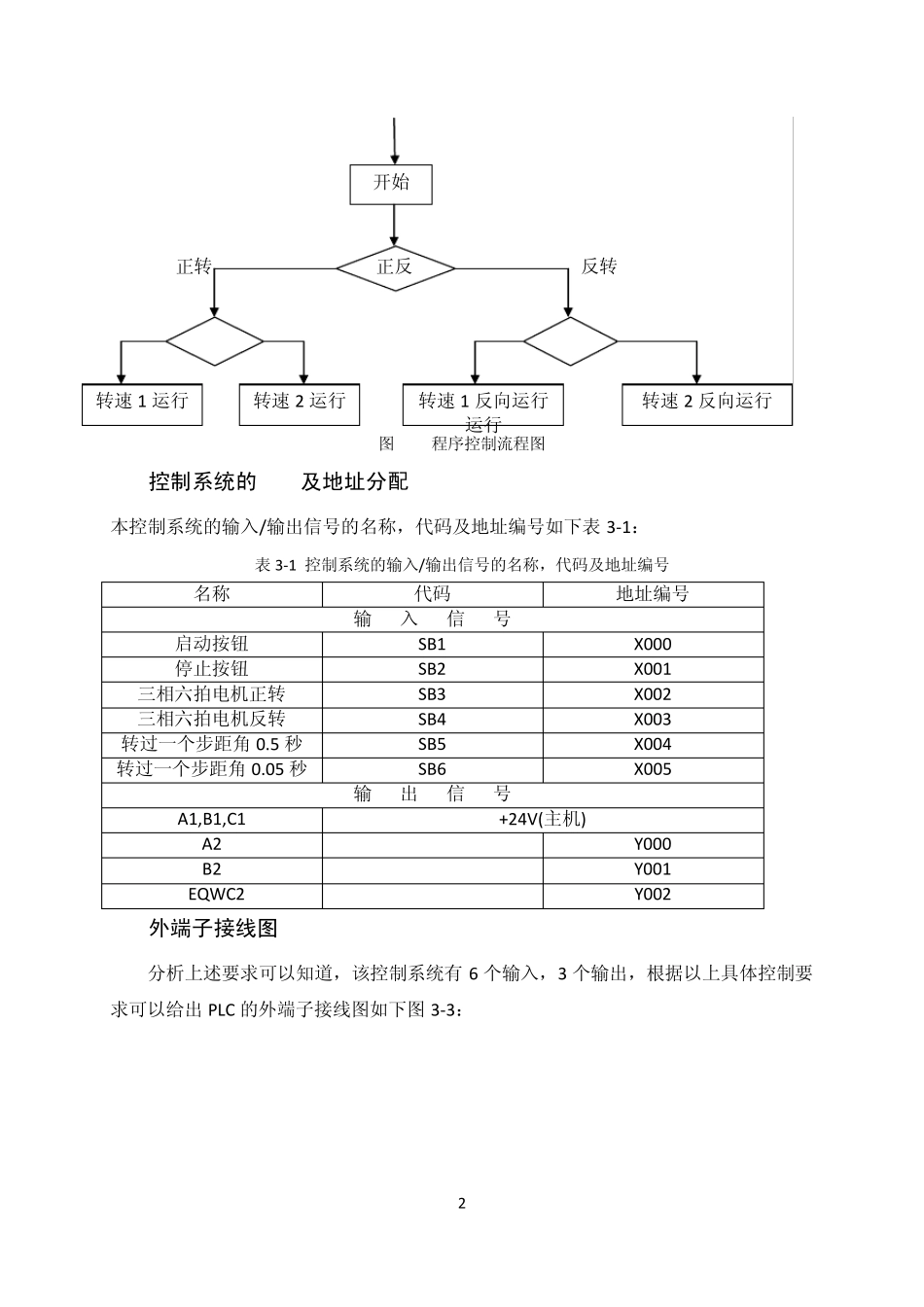
该控制系统的控制原理图如下图 3-1: 图 3-1 系统控制原理图 所以由以上控制系统的要求可以给出控制系统的程序流程图 3-2: 上 位 机 P L C 驱 动 器 功放电路 步进电机 2 正转 正反 反转 图3-2 程序控制流程图 3
2控制系统的I/O及地址分配 本控制系统的输入/输出信号的名称,代码及地址编号如下表3-1: 表3-1 控制系统的输入/输出信号的名称,代码及地址编号 名称 代码 地址编号 输 入 信 号 启动按钮 SB1 X000 停止按钮 SB2 X001 三相六拍电机正转 SB3 X002 三相六拍电机反转 SB4 X003 转过一个步距角 0
5 秒 SB5 X004 转过一个步距角 0
05 秒 SB6 X005 输 出 信 号 A1,B1,C1 +24V(主机) A2 Y000 B2 Y001 EQWC2 Y002 3
3外端子接线图 分析上述要求可以知道,该控制系统有 6 个输入