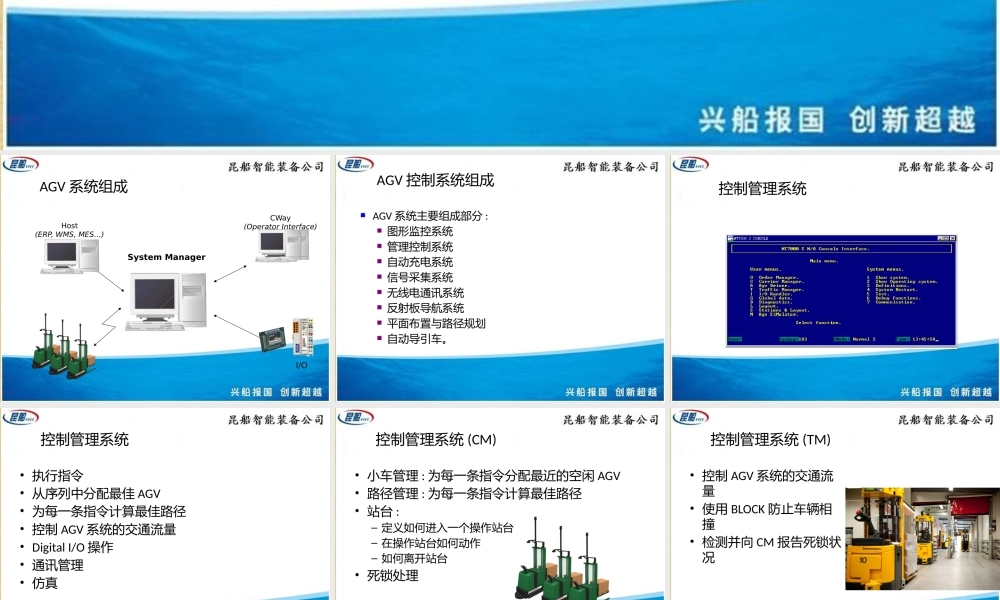
AGV 控制系统 AGV 系统组成System ManagerHost(ERP, WMS, MES…)CWay(Operator Interface)I/O AGV 系统主要组成部分 : 图形监控系统 管理控制系统 自动充电系统 信号采集系统 无线电通讯系统 反射板导航系统 平面布置与路径规划 自动导引车
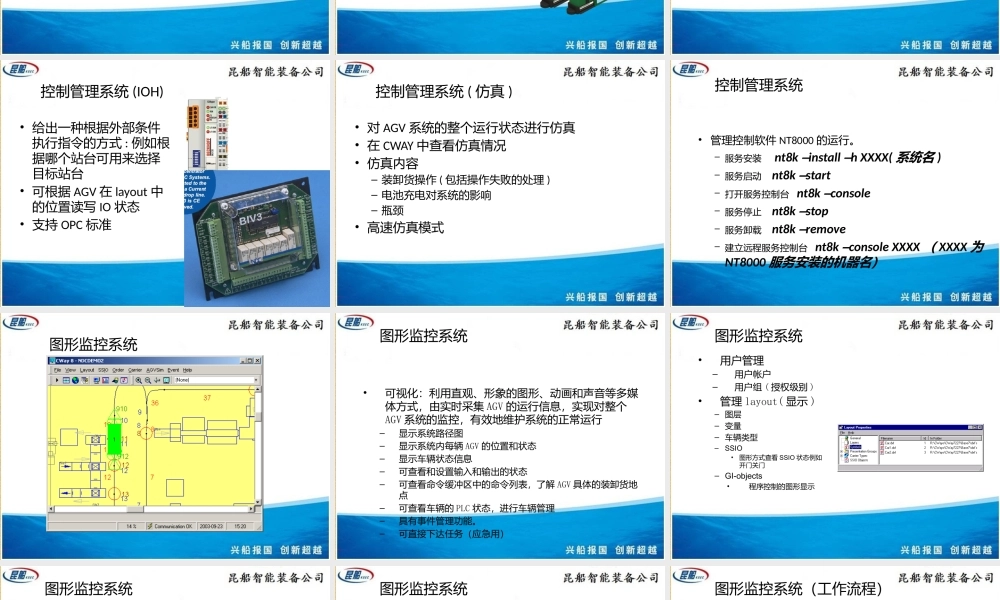
AGV 控制系统组成 控制管理系统 控制管理系统• 执行指令• 从序列中分配最佳 AGV• 为每一条指令计算最佳路径• 控制 AGV 系统的交通流量• Digital I/O 操作• 通讯管理• 仿真 控制管理系统 (CM)• 小车管理 : 为每一条指令分配最近的空闲 AGV• 路径管理 : 为每一条指令计算最佳路径• 站台 :– 定义如何进入一个操作站台– 在操作站台如何动作– 如何离开站台• 死锁处理 控制管理系统 (TM)• 控制 AGV 系统的交通流量• 使用 BLOCK 防止车辆相撞• 检测并向 CM 报告死锁状况 控制管理系统 (IOH)• 给出一种根据外部条件执行指令的方式 : 例如根据哪个站台可用来选择目标站台• 可根据 AGV 在 layout 中的位置读写 IO 状态• 支持 OPC 标准 控制管理系统 ( 仿真 )• 对 AGV 系统的整个运行状态进行仿真• 在 CWAY 中查看仿真情况• 仿真内容– 装卸货操作 ( 包括操作失败的处理 )– 电池充电对系统的影响– 瓶颈• 高速仿真模式 控制管理系统• 管理控制软件 NT8000 的运行
– 服务安装 nt8k –install –h XXXX( 系统名 )– 服务启动 nt8k –start – 打开服务控制台 nt8k –console – 服务停止 nt8k –stop – 服务卸载 nt8k –remove – 建立远程服务控制台 nt8k –console XXXX