RIEGL 三 维 扫 描 仪 地 形 图 培 训 教 程 一.相机参数调整 1
点击project—new 新建一个扫描工程实例: 2
右击左侧编辑栏的calibration,在弹出的方框中,选择第二项,即new cemara calibration (w irard): 3
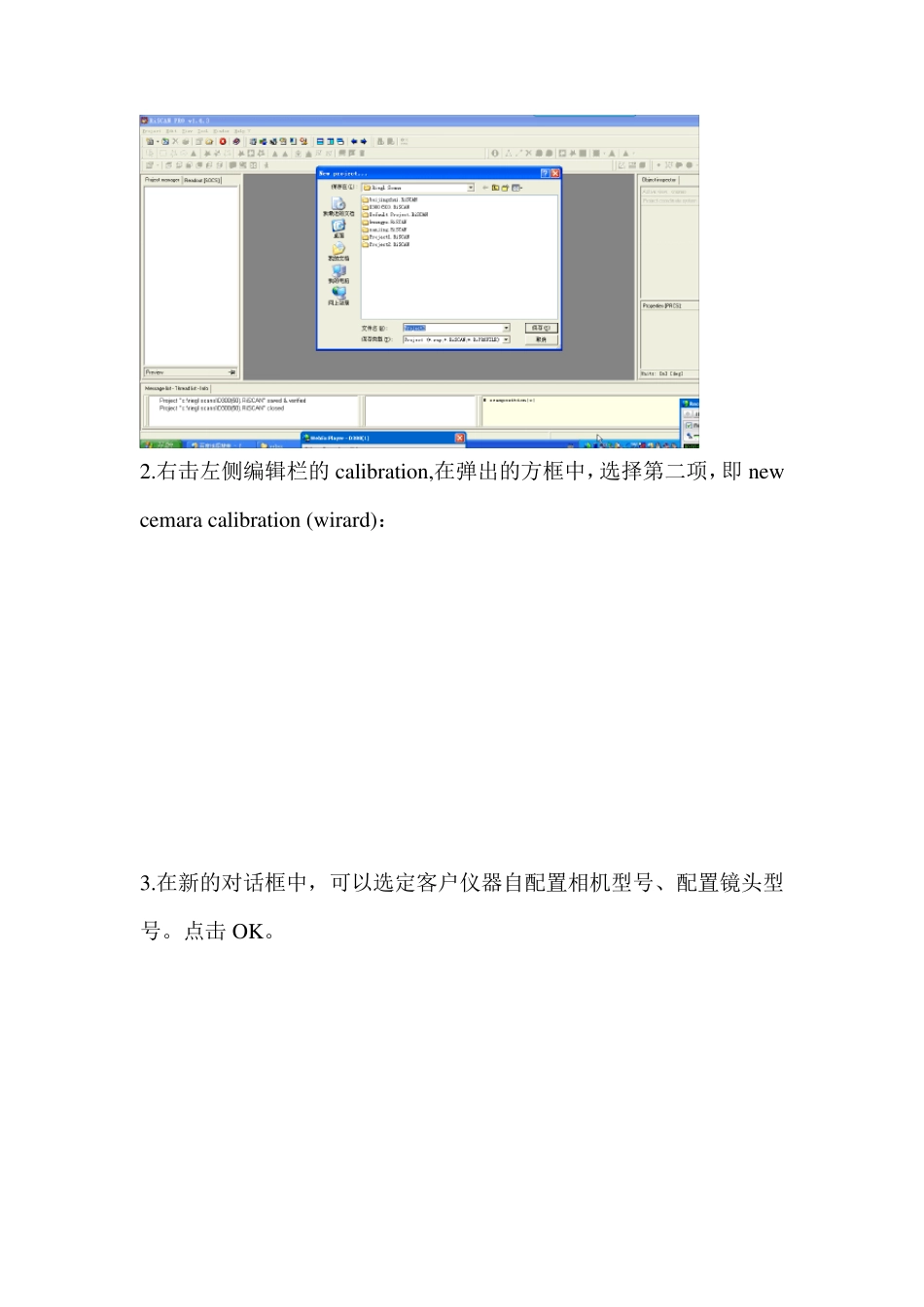
在新的对话框中,可以选定客户仪器自配置相机型号、配置镜头型号
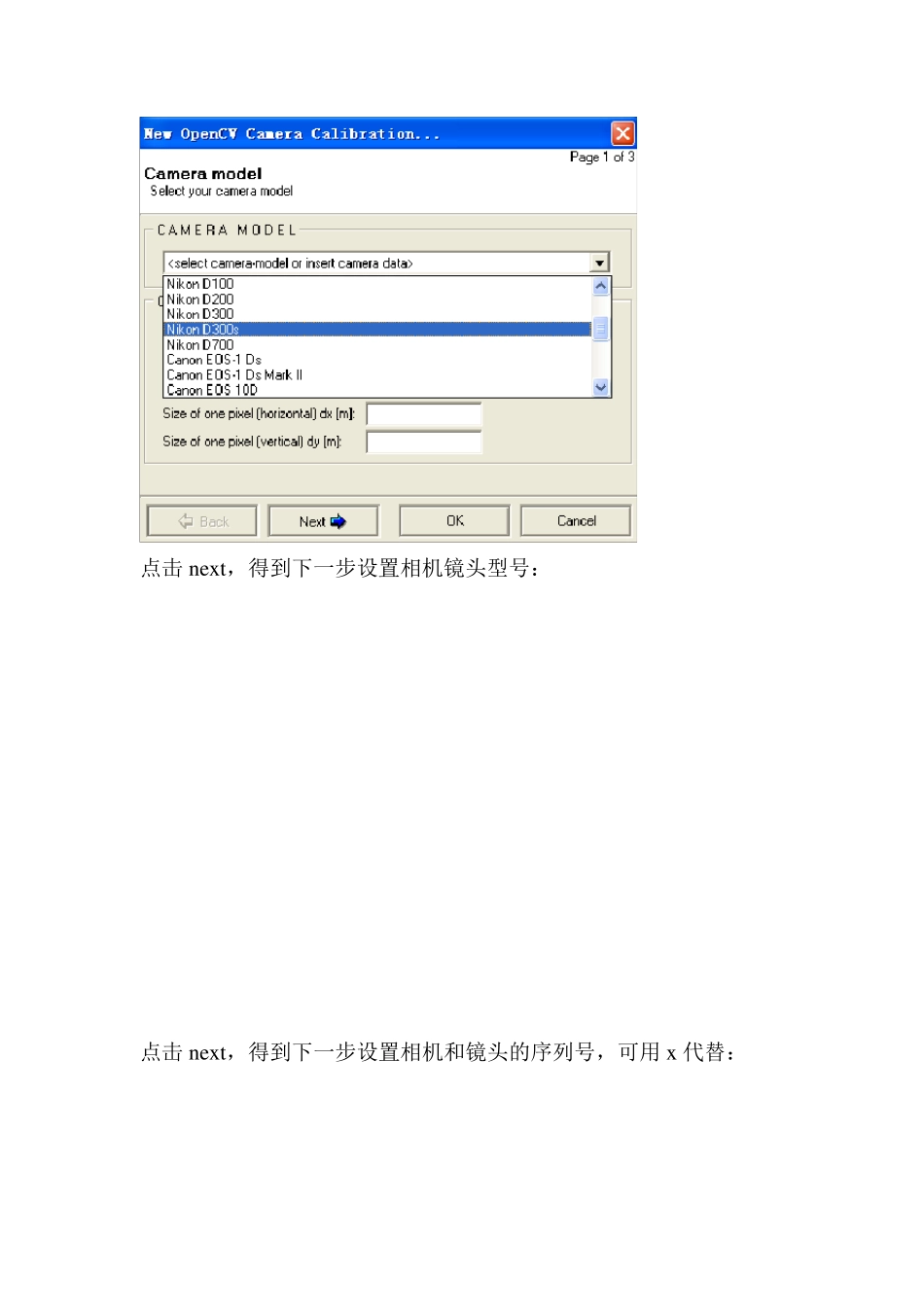
点击nex t,得到下一步设置相机镜头型号: 点击nex t,得到下一步设置相机和镜头的序列号,可用 x 代替: 点击OK,此时会在左侧编辑框中的calibration-camera 二级菜单中出现新的相机参数图框: 4
右击左侧编辑框的mounting 菜单,选择new mounting 选项
这时,会出现新的安装图标: 5
在左侧编辑框中右击scnas,建立新的扫描站和扫描工程:
在弹出的对话框中的instru ment 选项选择仪器型号; 右击扫描站,在弹出的新对话框中,选中distance 前面的方框(表示在10m 的距离处的扫描点间隔),start angle 和stop angle 设定起始角
此时将得到扫描数据视图: 6
点击左侧编辑框中的扫描数据图标,在出现的方框中选择find reflectors
在弹出的新对话框中threshold detection 设定反射率
并且把 delete ex isting tiepoints of tiepointlist前面的方框选中
此时将会出现以下界面: 7
双击扫描数据的图标,选择在出现的对话框中选择2D 显示模式: 8
在新打开的二维视图中点击按钮,在下拉框中选择第一项,show TPL SOCS: 此时,二维视图将出现仪器扫描点的坐标: 如果有地物的反射率较高,可能会造成干扰点,此时在二维视图中,按住 shift键,点鼠标选中,此点将变为红色: