S120 常见故障处理 1
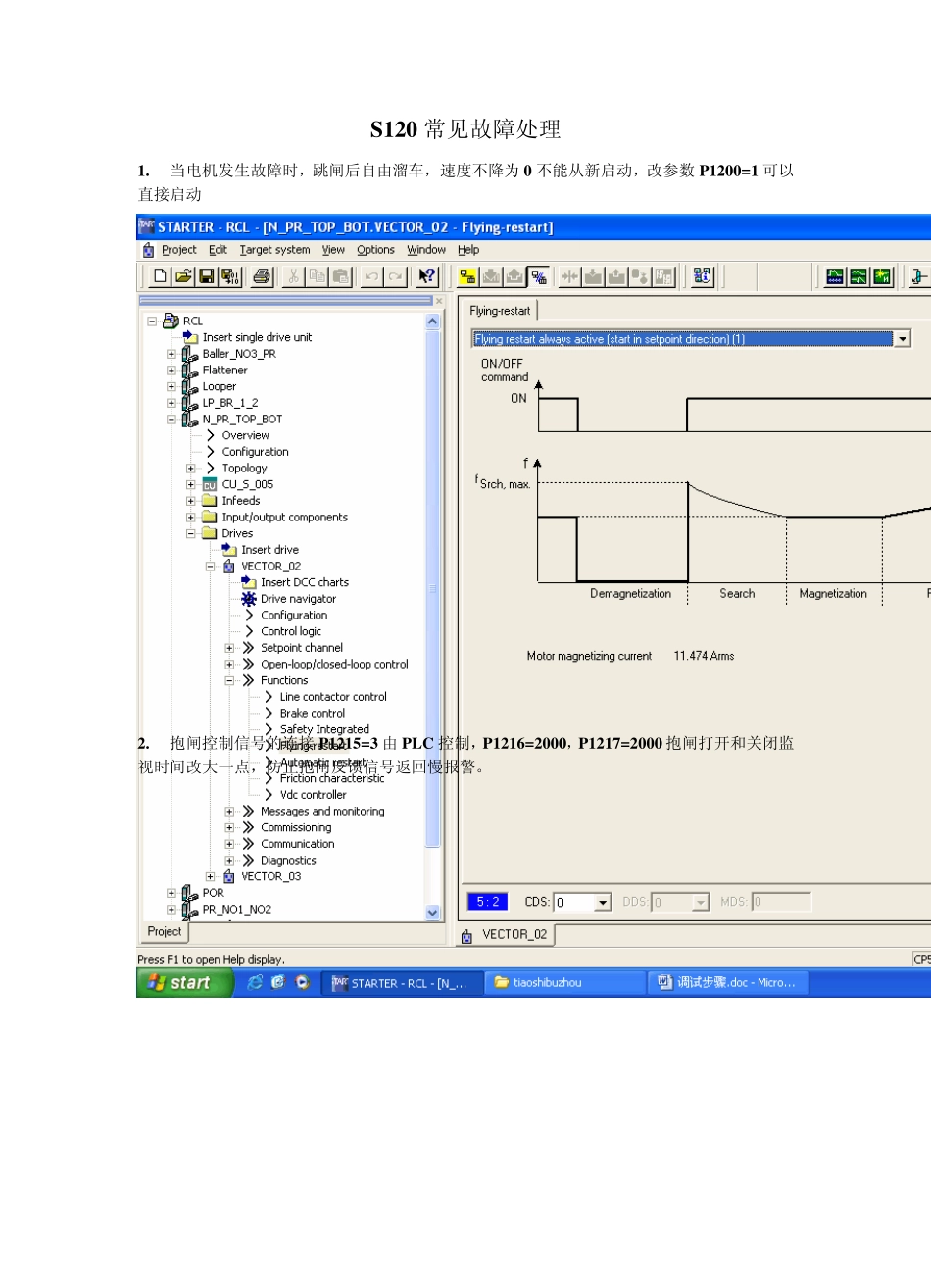
当电机发生故障时,跳闸后自由溜车,速度不降为0 不能从新启动,改参数P1200=1 可以直接启动 2
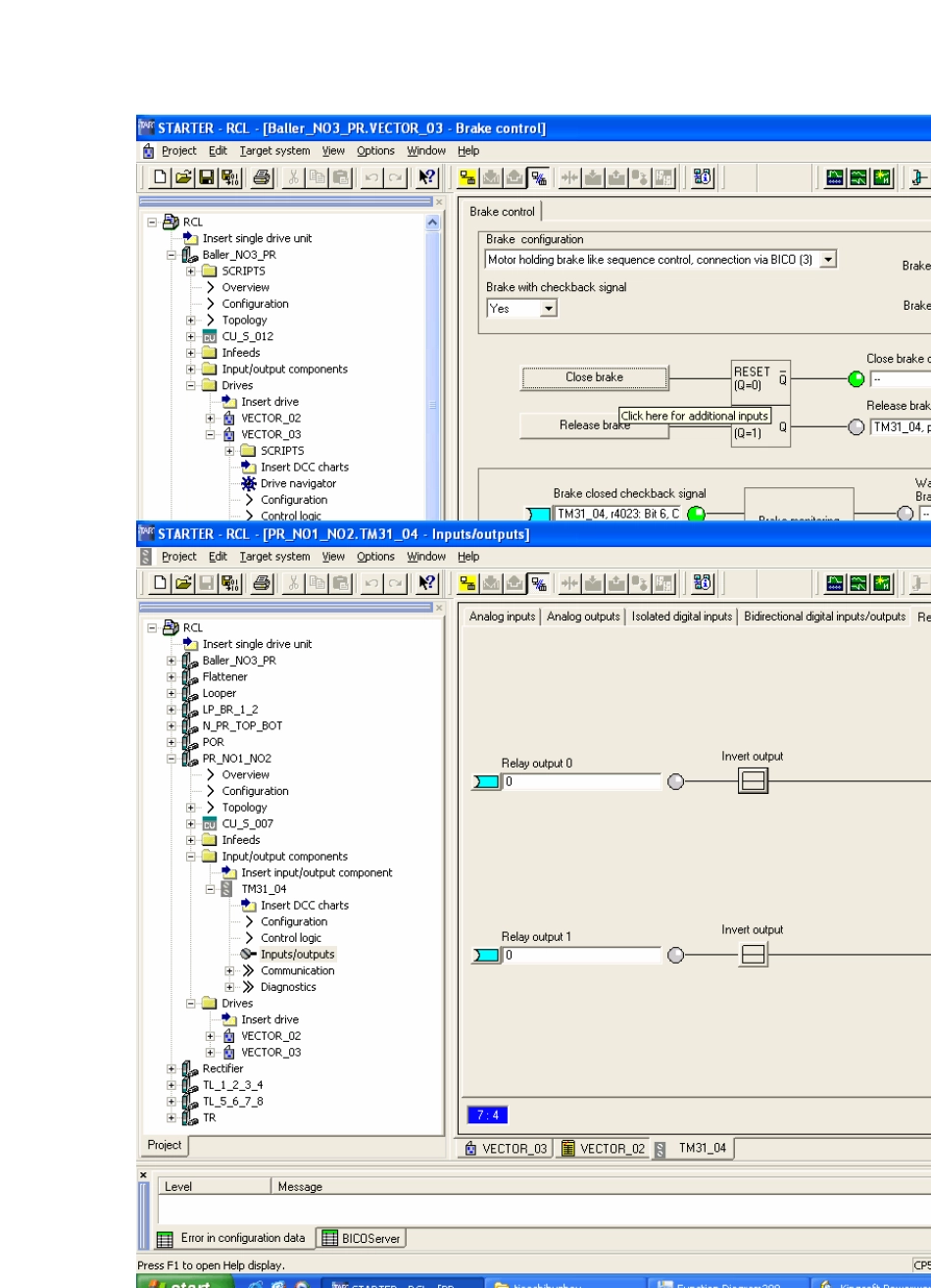
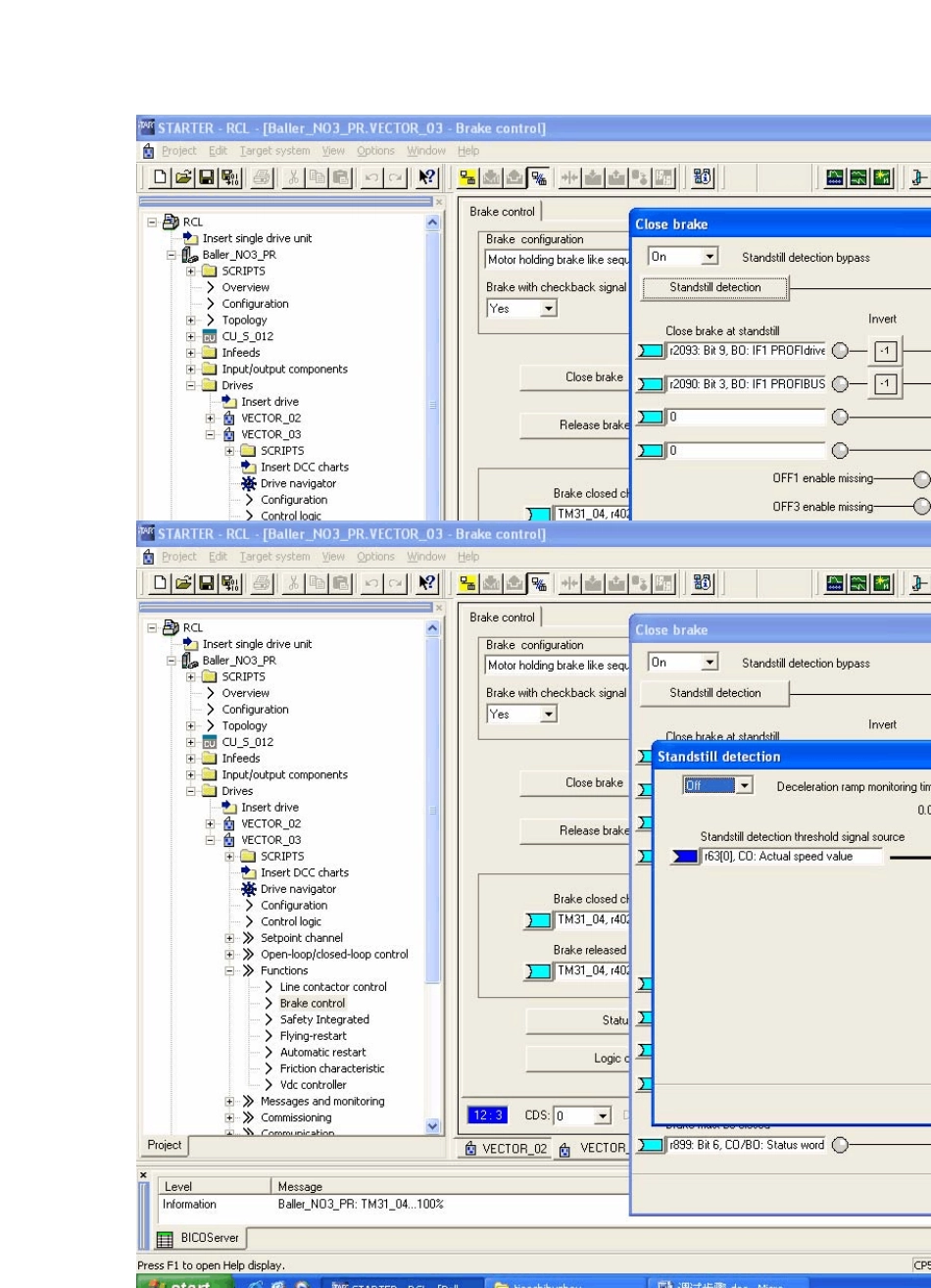
抱闸控制信号的连接P1215=3 由PLC 控制,P1216=2000,P1217=2000 抱闸打开和关闭监视时间改大一点,防止抱闸反馈信号返回慢报警
报(F7900)电机锁死故障,即有速度给定值,但实际值没有增长,转矩达到限幅值
改参数: P2175 =2
03%改到1
53% 速度设定监视极限值 P2177=10s 改到15s 故障延时时间 分两种情况(p1300≥20 或 p1300<20) p1300 < 20 (V/f open-loop control):It is not possible to select rotating measurement or speed controller optimization
p1300 = 20, 22 (sensorless operation):Only rotating measurement or speed controller optimization can be selected in the sensorless mode
p1300 = 21, 23 (operation with encoder):Both versions (sensorless and with encoder) of the rotating measurement and speed controller optimization can be selected
报(F7901)超速故障,即实际速度大于设定速度值 改参数: P1082 =110%改到115% 速度限幅值 或者KP 增大 5
报(F07902)电机堵转故障,偏差大于设定值,转矩达到限幅值,经过延时后报