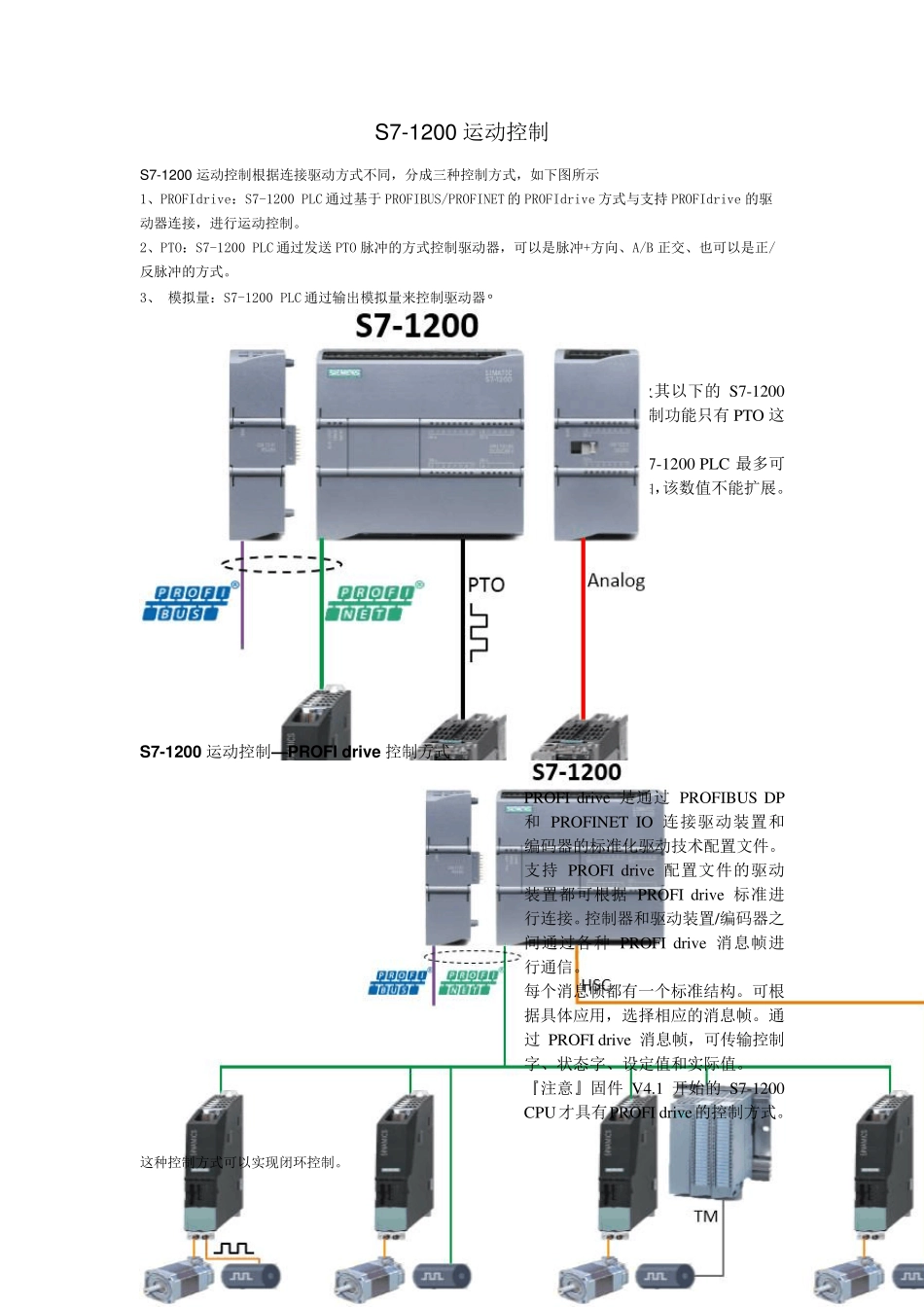
S7-1200 运动控制 S7-1200 运动控制根据连接驱动方式不同,分成三种控制方式,如下图所示 1、PROFIdrive:S7-1200 PLC 通过基于 PROFIBUS/PROFINET 的 PROFIdrive 方式与支持 PROFIdrive 的驱动器连接,进行运动控制
2、PTO:S7-1200 PLC 通过发送 PTO 脉冲的方式控制驱动器,可以是脉冲+方向、A/B 正交、也可以是正/反脉冲的方式
3、 模拟量:S7-1200 PLC 通过输出模拟量来控制驱动器
对于固件 V4
0 及其以下的 S7-1200 CPU 来说,运动控制功能只有 PTO 这一种方式
目前为止,1 个 S7-1200 PLC 最多可以控制4 个 PTO 轴,该数值不能扩展
S7-1200 运动控制—PROFI driv e 控制方式 PROFI driv e 是通过 PROFIBUS DP 和 PROFINET IO 连接驱动装置和编码器的标准化驱动技术配置文件
支持 PROFI driv e 配置文件的驱动装置都可根据 PROFI driv e 标准进行连接
控制器和驱动装置/编码器之间通过各种 PROFI driv e 消息帧进行通信
每个消息帧都有一个标准结构
可根据具体应用,选择相应的消息帧
通过 PROFI driv e 消息帧,可传输控制字、状态字、设定值和实际值
『注意』固件 V4
1 开始的 S7-1200 CPU才具有PROFI driv e的控制方式
这种控制方式可以实现闭环控制
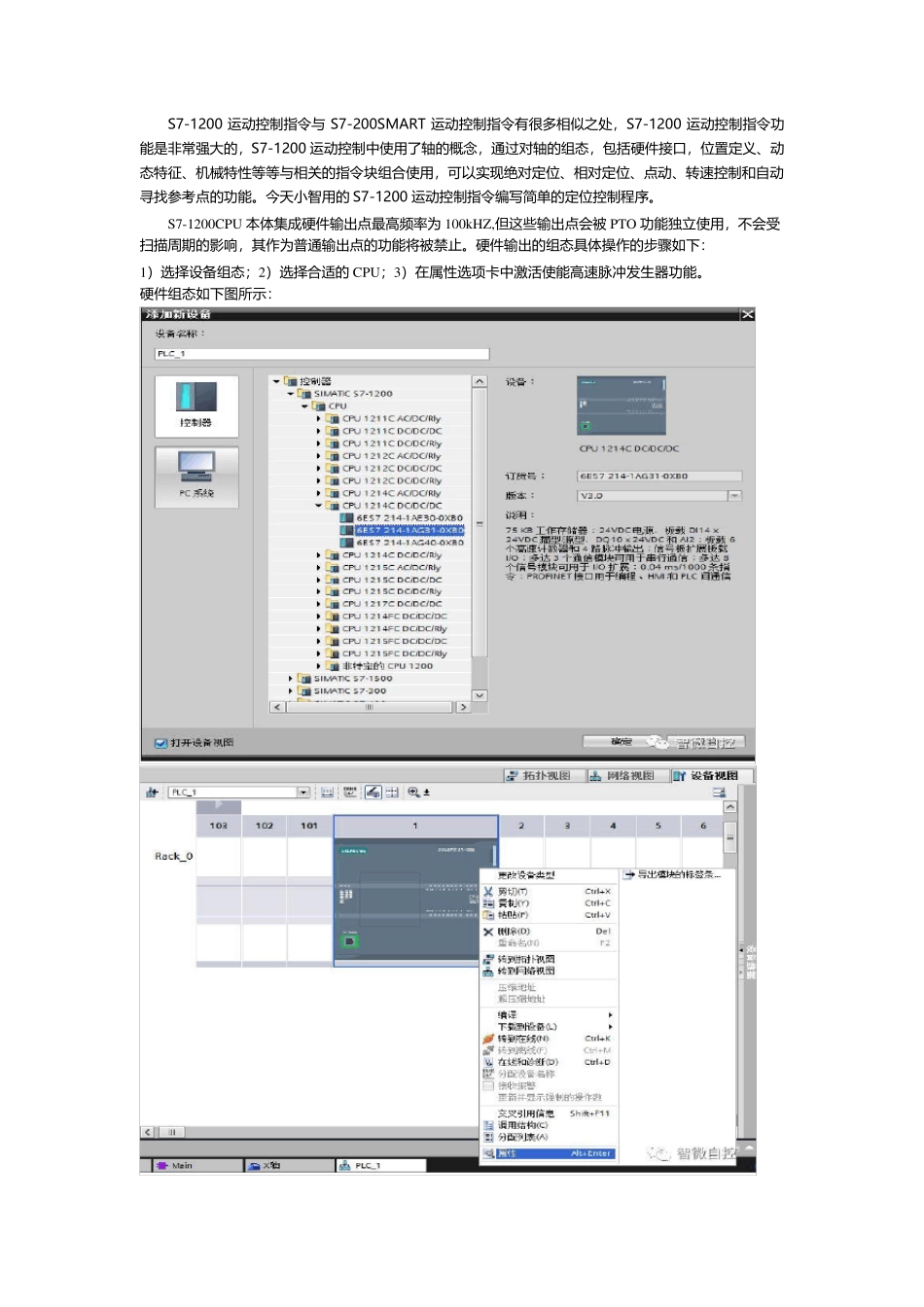
S7-1200 运动控制--PTO 控制方式 PTO 的控制方式是目前为止所有版本的S7-1200 CPU 都有的控制方式,该控制方式由CPU 向轴驱动器发送高速脉冲信号(以及方向信号)来控制轴的运行
这种控制方式是开环控制
S7-1200 运动控制--模拟量