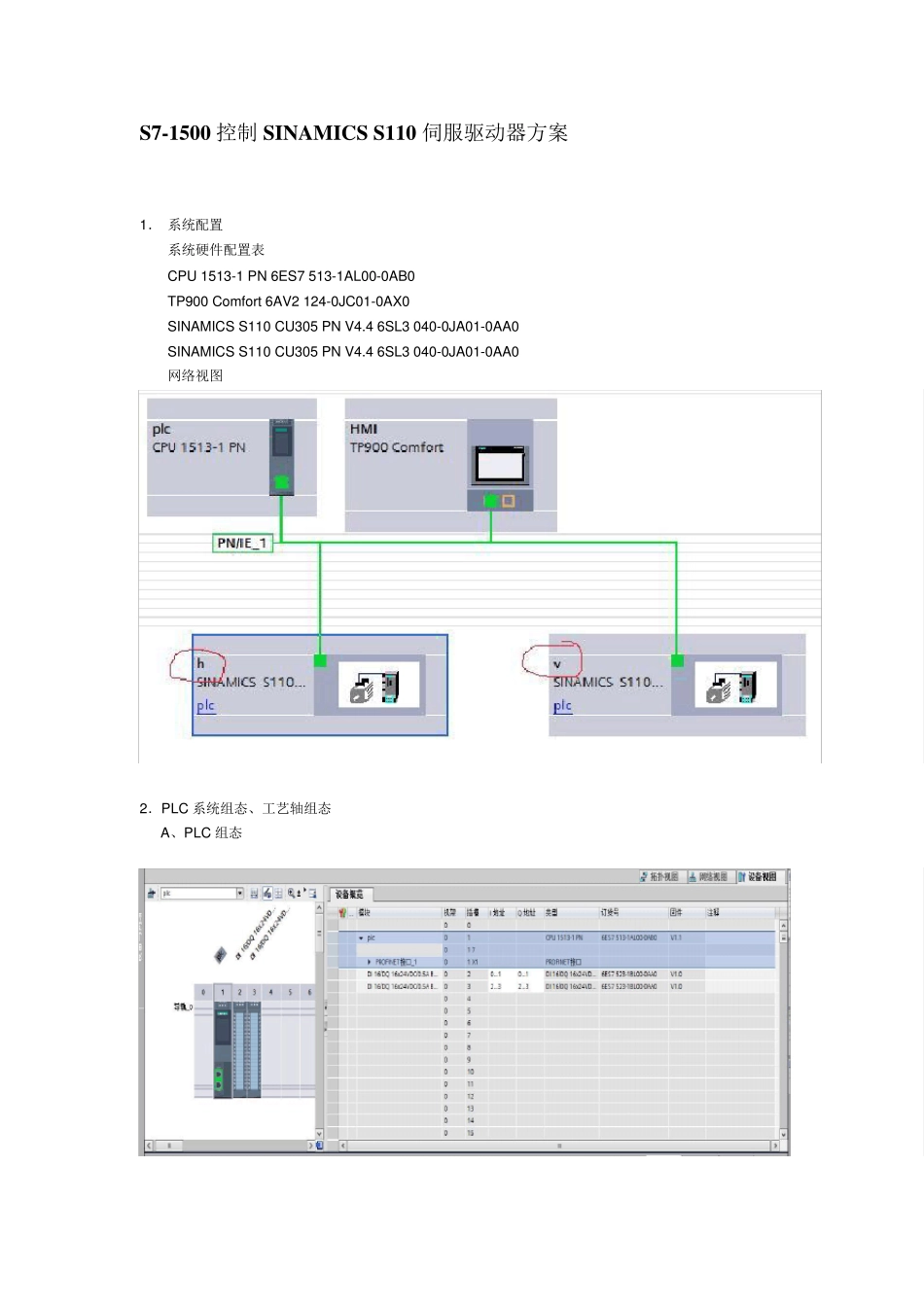
S7-1500 控制SINAMICS S110 伺服驱动器方案 1. 系统配置 系统硬件配置表 CPU 1513-1 PN 6ES7 513-1AL00-0AB0 TP900 Comfort 6AV2 124-0JC01-0AX0 SINAMICS S110 CU305 PN V4
4 6SL3 040-0JA01-0AA0 SINAMICS S110 CU305 PN V4
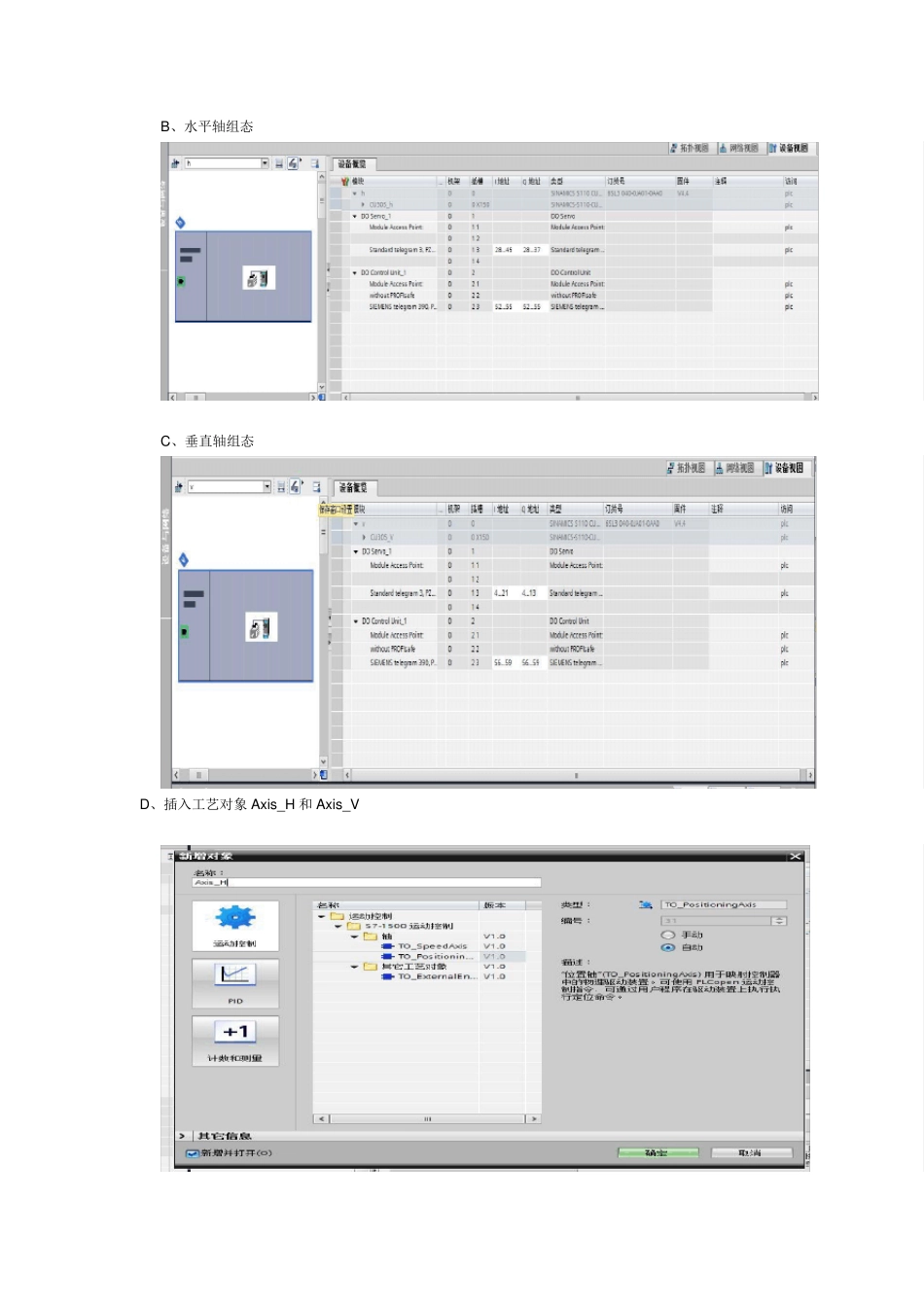
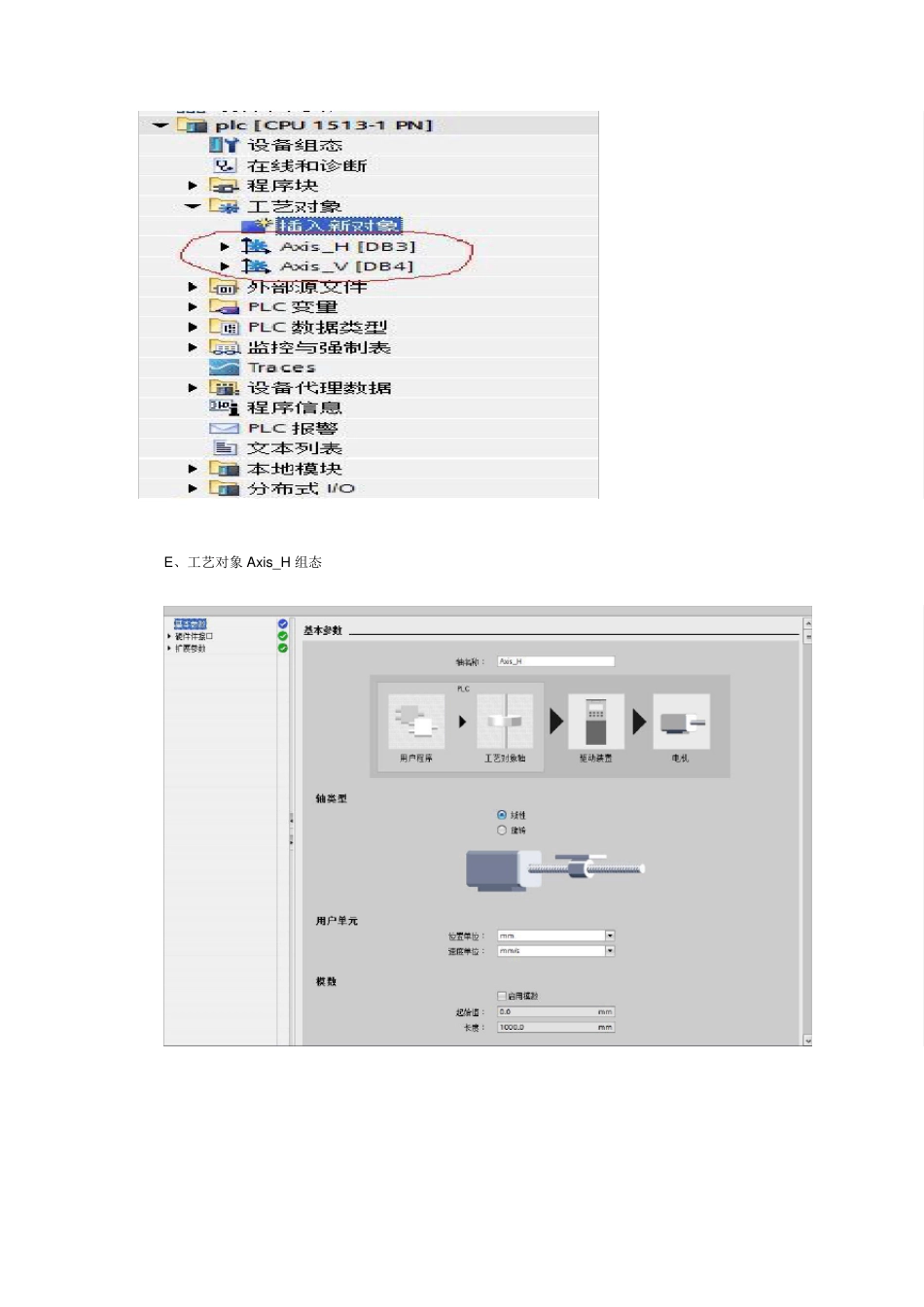
4 6SL3 040-0JA01-0AA0 网络视图 2.PLC 系统组态、工艺轴组态 A、PLC 组态 B、水平轴组态 C、垂直轴组态 D、插入工艺对象 Ax is _H 和 Ax is _V E、工艺对象 Ax is _H 组态 注意:报文需与Starter里面组态报文一致;参考转速、最大转速、单转步数、转数、GN_XIST1、GN_XIST2均可在 Starter 在线后参数里面查看
减速比,螺距均安实际情况计算所得
软、硬限位在调试初期可以不组态,等后期完善再添加即可
F、工艺对象 Ax is_V 组态同上 3.Starter 组态 A、新建一个项目 Config drive unit 报文和工艺轴里面组态要一致
4.PLC 手动调试程序编写 A、驱动器使能 B、驱动器 Statu sWord、ErrorWord、WarningWord 读取 C、电机当前位置读取 D、工艺报警复位程序编写 E、点动程序编写 F、回零程序编写 G 、绝对位置运动程序编写